國立臺東大學體育系研究所 碩士論文
指導教授:陳秀惠 博士
暖身減低現象在運動學習上的意義
研 究 生:莊勝期 撰
中華民國 97 年 7 月
國立臺東大學體育系研究所 碩士論文
指導教授:陳秀惠 博士
暖身減低現象在運動學習上的意義
研 究 生:莊勝期 撰
中華民國 97 年 7 月
謝誌
很高興也很榮幸能夠在台東大學體育學系碩士班讀了兩年的碩士課程,在其 中我感受到體育人的活力與專業,每個人都有矯健的身手與認真向學的精神,同 學間能夠彼此分享與互相幫忙,老師又是各各學有專精且溫馨關懷,在體育系的 課程兩年受益良多。
尤其要感謝我的指導教授 陳秀惠博士,跟著他三年研究討論的過程,讓我的 國際觀又更向上提升了一個層次,秀惠老師自己的學術研究都是朝著國際發表的 方向,言行舉止間也都這樣鼓勵我們,「運動控制與學習」的領域所需收集關注的 期刊文章也都是以國際上發表的為主,這些種種讓我更密切地接觸英文這項國際 語言,留意的也會是領域中國際最有份量與尖端的部分。
這是一個突破,不會再是井底之蛙的視野,知道世界是一個地球村,任何有 突破性的意見與研究都是自己必須吸收的範圍,只有跨出去,才能夠與人在同一 個水準之中。
這次的研究也要感謝同學 黃曉穗的幫忙,沒有她,這次的研究過程是不可能 完成的,也要感謝同研究室的 阿布的支援,當然參與研究的學弟妹,也感謝你們 的參與,你們是我能夠完成這個研究重要的功臣。
另外也要謝謝 劉有德老師,從我開始考碩士班收集題庫資料的時候,就受到 你的照顧與幫忙,之後也擔任我的論文口試委員,你的研究精神與成就也是我所 敬佩的。
最後仍謝謝體育系這個蓬勃有生氣的大環境,在這裡真的學習到了很多,也 肯定是對我往後人生有舉足輕重影響的經驗。
勝期 謹誌 民國九十七年七月
暖身減低現象在運動學習上的意義
莊勝期
國立臺東大學體育系研究所
中文摘要
暖身減低現象是我們運動學習中常見的現象,之前的觀點將暖身減低現象視 為是一種短暫現象,研究的重點是找出他發生的原因並且讓暖身減低現象的影響 降低,卻忽略暖身減低現象可能是一個系統性的行為改變,可能有他在運動學習 上的意義。本研究的目的在以動力系統為理論基礎,從時間刻度改變的觀點來看 暖身減低現象。本研究採用的方法為以 8 位臺東大學學生,每間隔 24 小時練習一 回平衡板平衡,共 12 回,每回 10 次的練習,紀錄其每次的平衡時間作為依變量,
並以指數函數、對數函數公式對每回合做適配,以判斷其學習曲線型態。結果發 現每回合減低的秒數與平衡成績無顯著相關;暖身減低的減低次數在適配後的指 數函數與對數函數回合中,並無明顯不同;每回合成績前三次的斜率比起後七次 來得大;暖身減低階段的改變率相較於十二回合的改變率屬於比較快的;而將參 與者的成績平均起來也得到上述三種結果。本研究部分結果符合動力系統中以時 間刻度看暖身減低現象時的推論,其不能證實部分,推估為子系統尚未有一致的 改變率,採用暖身減低值和回復次數的方法敏感度仍不夠來呈現暖身減低的情 形,所以沒辦法得到一致的趨勢。
關鍵詞:暖身減低、運動學習、動力系統
Examing the meaning of warm-up decrement in motor learning
Abstract
Warm-up decrement is commonly perceived in motor learning. The previous studies have regarded it as a temporary phenomenon and most of the emphasis has been put on why warm-up decrement happens and how people can lessen its influences.
However, the possibility is ignored that warm-up decrement might be a systematical behavioral change and might have played a vital role on learning process. This study was based on the theory of dynamical system, aiming to view warm-up decrement in the light of time scale. The participants of the study were 8 National Taitung University students, who were asked to balance on stabilometer 10 times a round, 24hours between each round, and 12 rounds in all. We recorded the balance time as the dependent variable and plotted as the function of practice trials. The learning curves of each practice round and totally were fitted by exponential function and power function. There were three main results founded in this study. First, no significant relationship was showed between the values of warm-up decrement in every practice and the individual’s balance performance. Second, no significant difference was founded between the fitting by exponential and power functions in each practice sessions. Third, among the 10 trials in every round, the slopes of the former 3 trials were larger than those of the latter 7 trials. Besides, the change in warm-up decrement part is faster than the learning process in all. Similar resuts were showed in averaged data. The conclusion of this study came to that the hypothesis of warm up decrement from dynamical system were only supported partially. It might be the different time scales among subsystems in whole body coordination and the fail of the sensitivity of variables applied in this study that accounted for the inconsistent results.
Key Words:warm-up decrement、motor learning、dynamical system
目次
中文摘要 ...I 英文摘要 ... II 目次 ...III 表次 ... V 圖次 ... VII
第壹章 緒論 ... 1
第一節 問題背景 ... 1
第二節 研究的重要性 ... 4
第三節 解釋名詞 ... 5
第四節 研究的範圍與限制 ... 7
第貳章 文獻探討 ... 8
第一節 運動學習理論 ... 8
第二節 學習曲線 ... 21
第三節 暖身減低現象的相關研究 ... 27
第四節 研究問題與假設 ... 32
第參章 研究方法與步驟... 32
第一節 研究參與者 ... 33
第二節 實驗設計 ... 33
第三節
資料處理與分析 ... 35
第肆章 結果 ... 37
第一節
學習成績與暖身減低現象 ... 37
第二節
學習曲線適配 ... 66
第三節 暖身減低與平衡表現 ... 73
第四節
個別與平均的曲線 ... 75
第伍章 討論 ... 80
第一節 從動力系統架構看暖身減低現象... 80
第陸章 結論與建議 ... 85
第一節
結論 ... 85
第二節 建議... 86
參考文獻 ... 87
中文文獻... 87
外文文獻... 87
附錄一 參加者須知與同意書... 92
表次
表 4-1 實驗參與者暖身減低總回合數 ... 56
表 4-2-1 實驗參與者 A 暖身減低現象摘要表 ... 57
表 4-2-2 實驗參與者 B 暖身減低現象摘要表 ... 58
表 4-2-3 實驗參與者 C 暖身減低現象摘要表 ... 59
表 4-2-4 實驗參與者 D 暖身減低現象摘要表 ... 60
表 4-2-5 實驗參與者 E 暖身減低現象摘要表... 61
表 4-2-6 實驗參與者 D 暖身減低現象摘要表 ... 62
表 4-2-7 實驗參與者 G 暖身減低現象摘要表 ... 63
表 4-2-8 實驗參與者 H 暖身減低現象摘要表 ... 64
表 4-3-1 第 2-5 回前三次與後七次斜率比較... 64
表 4-3-2 第 6-9 回前三次與後七次斜率比較... 65
表 4-3-3 第 10-12 回前三次與後七次斜率比較 ... 66
表 4-4-1 實驗參與者 A 指數函數與對數函數適配表 ... 67
表 4-4-2 實驗參與者 B 指數函數與對數函數適配表 ... 67
表 4-4-3 實驗參與者 C 指數函數與對數函數適配表 ... 68
表 4-4-4 實驗參與者 D 指數函數與對數函數適配表 ... 68
表 4-4-5 實驗參與者 E 指數函數與對數函數適配表... 69
表 4-4-6 實驗參與者 F 指數函數與對數函數適配表... 69
表 4-4-7 實驗參與者 G 指數函數與對數函數適配表 ... 70
表 4-4-8 實驗參與者 H 指數函數與對數函數適配表 ... 70
表 4-5
R2逐回曲線適配結果彙整表~
Rn檢查前 ... 72
表 4-6
Rn檢查結果... 73
表
4-7 暖身減低與該回合成績(平均)相關情形... 74表 4-8 指數與對數回合暖身減低次數摘要表 ... 74
表 4-9 暖身減低階段變化率平均與整體曲線改變率摘要表 ... 75
表 4-10 平均後資料暖身減低情形摘要表 ... 77
表
4-11 平均後資料暖身減低秒數與該回合成績(平均)相關情形 .. 77表 4-12 平均後成績指數函數與對數函數適配表 ... 78
表
4-13平均後資料 R
n與理論推估值比較... 79
圖次
圖 2-1 訊息進行的步驟及形式
... 11圖 2-2
穩定與不穩定的吸引子 ... 15
圖 2-3 景觀的改變圖 ... 18
圖 2-4 對數函數曲線示意圖... 22
圖 2-5 指數函數曲線圖... 24
圖 2-6 追蹤儀實驗結果圖... 27
圖 3-1 實驗器材與場地佈置... 34
圖 4-1 參與者 A~H 練習成績 ... 38
圖 4-2 參與者 A 第 1~12 各回練習成績... 41
圖 4-3 參與者 B 第 1~12 各回練習成績 ... 43
圖 4-4 參與者 C 第 1~12 各回練習成績... 45
圖 4-5 參與者 D 第 1~12 各回練習成績... 47
圖 4-6 參與者 E 第 1~12 各回練習成績 ... 49
圖 4-7 參與者 F 第 1~12 各回練習成績 ... 51
圖 4-8 參與者 G 第 1~12 各回練習成績... 53
圖 4-9 參與者 H 第 1~12 各回練習成績... 55
圖 4-10 平均後的練習成績... 76
第壹章 緒論
第一節 問題背景
運動學習過程中,我們透過練習與回饋改變了固有的動力,因此學會新的動 作型態(Kelso, 1997)。我們在這個過程中有些事情是會共同經驗到的,例如暖身 減低現象(warm-up decrement)。
暖身減低現象不只發生在運動學習過程中,在其他的認知學習也會見到
(Underwood, 1957),一般指的是在休息之後,得有一段時間才能夠達到休息前的 水準,而此現象尤其在運動學習過程中容易觀察到,例如網球擊球時,在休息前 我們經過了練習,已經可以將球在最恰當的時間點上擊出,但在休息後,我們總 是很難如休息前一樣在最恰當時間點上擊到球,但又經過一小段時間的練習後,
這樣的情形消失了,我們又可以回到休息前的水準,不但時間點抓對了,力道也 控制得剛剛好,回到我們的水準,甚至又經過一段時間的練習後,比起休息前我 們更進步了。這樣的現象常常出現在運動學習的過程中,且不止在如網球這樣開 放性的運動技能上;在閉鎖性的運動技能中我們也會有這樣的經驗,例如體操的 空中旋轉動作,在休息後,往往得練習一段時間,才能夠將技巧表現得跟休息前 一樣。如此現象,就是我們通常認識的暖身減低現象。
對於此現象,從二十世紀初就有學者關注到,並且做了相關的探討文獻,
Adams(1961)對於之前的暖身減低現象文獻做了一些整理,歸納整理了二十世紀 初直至1961年所對於暖身減低現象所下的定義,及為什麼會有暖身減低的種種原 因,其中最普遍且直覺為大家所接受的原因就是「遺忘」(memory losses)。何謂 暖身減低現象?這個定義在過去的研究中並無一致性,暖身減低的發生是什麼原 因造成的也有許多不同的看法,Adams(1961)年的文獻中也認同Irion(1948)年 指出的集合假說(set hypothesis),就是說暖身減低的因素不只是因為遺忘而已,
還有注意力的因素在。而在Adams之後的二十年中,沒有人再對此有更新的見解與
看法出現,直到 1971 年 Schmidt & Nacson才提出新的看法,對原來的定義做了 補充,也是目前為止最廣為人接受的理論,也就是活動集合假說(activity-set theory)
理論,認為暖身減低發生的原因不只是因為休息時,對特定目標忘記了或還沒準 備好而已,而且是全身整體性的狀態還沒準備好,例如覺醒程度、動機、整個身 體的神經緊張狀態。
歷史上對於暖身減低的解釋,其實也都反應了當時的心理學主流,例如二十 世紀初對於暖身減低的解釋主要以「刺激—反應」的制約理論作為解釋,著眼點 在遺忘及制約的強度(Adams, 1961),而在心理學在60年代開始受到電腦的發展影 響而轉為訊息處理理論的認知心裡學時(張春興,1991),剛好也是活動集合論理 論提出的時候,認為身體活動還跟腦中的認知有關係,暖身減低一部份就是因為 認知系統還沒有準備好所致。
在活動集合假說的檢驗上,實驗者以操弄休息時的各種相關元素以減少暖身 減低效應的負面影響,證實了暖身減低並不只是跟目標有直接連結關係的因素才 有影響,而是全身普遍的狀態還沒準備好所致。但此關注傾向卻忽略了對暖身減 低階段的改變進行分析,也忽略了暖身減低過程可能也是對動作學習過程是具有 意義的。
基模理論(schema theory)是由認知理論發展出來,對動作行為領域做出廣 泛性地解釋,此理論卻在近年受到不少的挑戰(K. M. Newell, 1991),發展最盛的 莫過於動力系統理論(dynamical system theory)的提出,動力系統這解釋方法包 含著非線性力學(nonlinear dynamics),而非線性理論又包含著渾沌理論(chaos theory),是還正在發展的一個理論(Liu, Mayer-Kress, & K. M. Newell, 2004),認 為人的動作行為不只是因為大腦中的控制,學習也不止僅由大腦做為主宰,運動 中,尤其是在新型態的動作學習及突發性的動作上,動力系統理論認為人受到環 境(environment)、工作(task)、有機體(organism)上的限制而以自我組織
(self-organize)的方式進行動作的控制與學習(K. M. Newell, 1986),能對新的
協調型態及突發性不經思索的動作產生有比較合理的解釋。
動力系統認為動作行為是相關系統間或系統間各元素交互作用下所表現出的 結果,但因為此交互作用在形成的過程無法觀察,因此必須在目標動作中量化一 個觀察的表現,這個外顯表現越能夠隨著練習敏感地改變越好,我們也用這個改 變的值來描述經學習過程後協調型態的變化(Higgins, 1991; Kelso, 1997 ; K. M.
Newell, 1985)。對於這個值,在科學研究中,經常透過數學的方法來描述,如此以 學習過程中改變的結果值對練習量的關係作成曲線或圖,稱為「表現曲線」,也有 學者認為也可以是「學習曲線」(Cohen, Dunbar, & MacClelland, 1990; Kramer, Strayer, & Bucklley, 1990; Logan, 1988; R. A. Newell & Rosenbloom, 1981; Snoddy, 1926)。
以學習曲線來紀錄與描述運動學習的情形時,我們會透過數學方法找到這些 學習資料的規則,最常見的就是看這個資料形成的曲線是屬於對數函數曲線、指 數函數曲線或 S 型函數曲線,除此之外,也可以透過計算每次練習的改變率的作 法來觀察學習者的學習情形,雖然以這個方式不免會因為裡頭所包含的訊息比較 凌亂而困擾,但這方法能夠顯示出更多的訊息,讓我們更明白練習者運動學習的 情形(Liu 等,2004)。
觀察分析學習狀況時一般都觀察單一能力的改變情形,通常是分析比較長時 間的變化,但用不同的時間段落來觀察,整個運動學習卻可以呈現更多的意義(K.
M. Newell, Liu, & Mayer-Kress, 2001),而暖身減低是我們運動控制與學習上常見 到的現象,屬於以比較短的時間刻度可以觀察得到的運動控制與學習行為,動力 系統主張暖身減低不只是一種短暫的現象,而是有其在運動學習上的意義的(K.
M. Newell, Liu, & Mayer-Kress, 2001)。
第二節 研究的重要性
除了以長時間的行為變化來看運動學習外,以不同的時間段落來觀察學習過 程,整個運動學習是可以呈現更多的意義(K. M. Newell, Liu, & Mayer-Kress, 2001)。運動學習過程中短時間的改變,可能會有不同於長時間變化的情形,例如 我們觀察一個學習者學習網球發球時,我們觀察他六個月的練習,會發現他的動 作從不協調改變為協調,球的力道從施不上力改變為凌厲,發球的落點也從無法 發進而改變為有漂亮的落點。但是除了以這樣長時間的技術改變的觀點之外,如 果我們以較短的時間間隔分析他學習的過程,我們可能會發現他的動作是如何從 不協調改變為協調,如何從太快揮拍或太慢揮拍,而最後能在剛好的時間點上打 到球。在以往這樣短時間的變化可能都僅被認為是噪音或隨機發生而已,但這樣 的變化可能不止是隨機或沒意義而已,而是在運動學習上有它的意義存在。
在過去對於暖身減低的看法,如集合假說理論、活動集合論理論等雖然對暖 身減低現象提出解釋,研究者也針對這個現象所可能有的影響因素做研究,但所 著眼的層面,都是如何減少暖身減低的現象,研究如何讓選手、學習者一到運動 情境或競賽情境能控制影響的因素,快速地到達自己的水準,在這個觀點底下的 研究,都是將暖身減低視為是一種短暫現象,以減少此現象為目標,並沒有將暖 身減低效應如此短時間的變化視為是一種系統性的行為改變,有可能有他學習上 的意義,而有很多學者近來以動力系統的觀點來解釋學習行為的短時間變化,證 實這些變化並不是隨機出現而是有他系統上的意義 (K. M. Newell 等, 2001)。而 K. M. Newell 等主張應該從時間刻度(time scale)的觀點來瞭解運動學習時的系 統變化,以前我們常做的是從較長如一個月一年的長時間刻度的角度來看變化,
但是較短的時間刻度,如每一次的練習間的變化,也會有其運動學習上系統的意 義,暖身減低現象就是這樣以較短時間刻度觀察運動學習時,常可以觀察得到的 行 為 。 而 動 力 系 統 提 出 動 作 的 吸 引 子 ( attractor point ) 及 動 作 學 習 的 景 觀
(landscape)的觀念,越靠近該動作的吸引子,動作會越穩定,也會越快回到穩 定的狀態(Thelen & Smith, 1993),如此可能也可以替暖身減低的現象提供一個很 好的解釋,對暖身減低現象在運動學習上可能有的意義提供一個理論可能性。
另外在推論分析暖身減低現象或者其它運動學習時,通常都以群體運動學習 的成績平均後加以分析,並用以解釋運動學習的成效,但平均後的成績卻往往掩 蓋了個體不同的學習改變率所呈現的意義(Liu 等, 2004),成績平均後雖然讓雜 訊的干擾降低了,但是有可能意義也不同了,且如半開玩笑解釋的蝴蝶效應的看 法:今天北平一隻蝴蝶展翅揮舞所對空氣造成的擾動,可能觸發下個月紐約的暴 風雨,初始的的小小不同會大大影響以後的結果(Griffiths, Hart, & Blair, 1991),
這種略去不看的小小差異,卻有可能正是影響日後學習成果的關鍵,我們將成績 平均起來所掩蓋的小小差異有可能就會導致推論的不正確。
因此本研究將以時間刻度的觀點,檢驗暖身減低現象是否符合動力系統理論 模型預測,並以個別學習者的學習情形與群體平均後所推估出的學習情形作比 較,看群體資料與個別學習資料中的差異。
第三節 解釋名詞
一、 暖身減低現象
暖身減低現象一般指的是在休息之後需要一段時間的練習來達到休息之前的 水準,根據 Irion 在 1948 年的操作定義為「在休息後前期,表現進步的斜率比 起休息前更高」,在本研究中指的是每回合第一次試作到第一個表現峰值(peak trail)的練習稱之,也稱為「暖身減低階段」。
在暖身減低現象的量化部份:
(一)暖身減低:計算第一次試作到峰值間平衡秒數的差距
(二)回復次數:計算第一次試作到峰值間所需的次數。如第三次試作為峰值,
則其所需「回復次數」為 3-1=2,其回復次數為 2 次。
在學習曲線的分析部份
(三)整體曲線:指第一回到第十二回共 120 次試作所記錄的平衡成績對練習 次數所的曲線。
(四)逐回曲線:指每回合的 10 次試作所記錄的平衡成績對練習次數所得的曲 線。
二、運動學習
學習是一個透過經驗或練習,造成行為上長久性改善的過程,而運動技能的 純熟是來自內在、持續的變化所產生的外在行為(Magill, 1998),本研究以練習 的時間對表現做圖而成的點狀分佈圖,並以此呈現學習時系統的演進過程,在本 研究中指的是平衡板學習時,三十秒中保持平衡板在左右兩邊正負 5 度內的累積 時間作為學習時表現的成績。
三、改變率
指系統隨著每次練習而產生的行為變化率,適配後並由適配值算出不同函數 推估出的逐次改變率:
(一)兩次操作間改變的程度,公式為逐次改變率R =(Wn n- Wn+1)/( Wn-Bexp)。Wn
為第 n次得分,Wn+1為第 n+1次得分,Bexp 是最佳表現。
(二)指數、對數逐次改變率:
1、對數函數逐次改變率為 R =1-(1+1/n)n pow
−r
,n代表第 n次練習得分,
r
pow指的是以對數函數公式適配時所得到的指數。
2、指數函數改變率:1-
e
−rexp ,rexp指的是以指數函數進行適配時所得到的理論 改變率,e
指的是自然指數,自然指數為 2.718。3、將整回或整體曲線加以適配,以指數函數公式適配,算出整回或整體的指數改變 率。
第四節 研究的範圍與限制
本研究情境為實驗室內,實驗參與皆控制在每天的同一時間進行平衡板的平 衡練習,也就是休息時間是固定的。本研究的平衡技能為配合平衡測驗儀所進行 的基底上下移動的平衡技能。
第貳章 文獻探討
第一節 運動學習理論
有很多的理論對動作如何學習得來提出不同的看法,最開始令人注目的說法 是閉鎖環理論(closed-loop theory),是第一個對運動學習有深遠影響的理論(K. M.
Newell, 1991),但因為仍有許多的運動學習與控制的情形是閉鎖環理論無法合理 解釋,所以後來有基模理論的提出,用以解釋運動學習與控制,基模理論也成為 運動控制與學習上廣為接受的解釋方式。在基模理論之後,運動控制與學習上有 動力系統的提出,動力系統本來是一套用來解釋物理現象的數學方法,但被認為 仍可以用來解釋運動控制與學習,在許多基模理論所沒有探究與完整解釋的層面 上,用動力系統能夠有更系統性的解釋,以下將以這三種運動學習的理論做探討。
一、閉鎖環理論
運動學習在70年代之前認為是跟一般的認知學習一樣的機制,所以用來解釋 運動學習發生的理論也都引用自語文技能(verbal skill)建構出的理論,後來學者 發現,動作技能的學習在特性上跟其他語文學習、認知學習是有明顯的不同。
首先提出對之後的運動學習都有重大的影響的就是 Adams(1971)提出「閉 鎖環理論」(K. M. Newell, 1991),他用閉鎖環理論來描述、解釋及預測動作技能 的學習。此理論提出後,造成動作技能學習研究方向的改變,重新引發動作技能 學習定律的探討(Kerr, 1980)。Adams理論裡指出人類的動作學習與技能是靠著不 斷地修正來達成動作的目標,在這過程中基本上是運用回饋(feeback)、正確的參 考(reference of correctness)、偵測錯誤(error detection)來達成(Schmidt, 1982)。
此理論認為人的學習是靠兩個機制來運作的,一個是「記憶痕跡」(memory trace), 一個是知覺痕跡(perceptual trace)(Adams, 1971)。中樞神經中有一「記憶痕跡」,
他的角色是負責選擇動作從哪裡開始及讓人知道動作的起使狀態要用怎樣的力量
強度。記憶痕跡中有訊息知道動作該如何執行,動作一旦開始執行後,便以「知 覺痕跡」作為參考值,經回饋比較後修正,產生新的記憶痕跡,成為下一次動作 的標準。此理論中認為運動學習就是反覆根據動作產生的內在及外在回饋而進行 對記憶痕跡的修正,因此在動作後,回饋及同樣動作反覆練習是必要的(Adams, 1971)。也就是說運動學習是以「記憶痕跡」與「知覺痕跡」為基礎的「雙歷程閉 鎖環理論」(two-processes closed-loop theory),以解釋人類的動作行為(Kerr, 1980)。
閉鎖環理論的限制與挑戰第一個是邏輯上的矛盾,並不是所有的動作都會成 為一個閉鎖性的循環,也就是說一個進行中的動作卻遇到突發狀況必須反應時,
可能沒有一個記憶痕跡可以來做比較,動作時訊息可能就得要跟動作自己做比 較,動作在進行的同時就得要立即進行修正以完成任務(K. M. Newell,1991),例 如很多球類的狀況在狀況突然改變的時候,就得立即動作。如網球的抽球,來球 的旋轉出乎自己的意料而動作已經做出時,我們得立刻的改變自己的動作與力道 以應付來球,在這樣的情況下,閉鎖環理論將很難對於動作的控制提供解釋。
另 一 個 閉 鎖 環 理 論 的 限 制 與 挑 戰 是 無 法 解 釋 變 異 練 習 的 效 果 ( Schmidt, 1982),為了加強記憶痕跡,因此需要加強練習同一組動作,不斷的加以修正記憶 痕跡,使其能夠正確的達成任務,閉鎖環理論受到很多的挑戰,因為其基礎建構 在速度慢的運動上,如在變異練習中所得到的回饋是不同的知覺痕跡,因此根據 閉鎖環的推論,變異練習是較無效果的練習方式,因為並非對同一知覺痕跡進行 修 正 , 與 實 證 研 究 上 的 結 果 不 相 符 合 , 事 實 上 變 異 練 習 可 以 提 高 學 習 效 果
(Schmidt,1982),如球類的練習就很難讓每個練習都有相同的情境,因此球類的 練習所得到的效果就很難以閉鎖環理論的解釋來說明,也就是球類的變異練習是 有效的,但這卻與閉鎖環理論推論不同。在此閉鎖環理論裡面,我們動作的基模 是一個一對一的關係,一個基模是控制著一組動作,我們唯有對這個基模不斷地 加強練習,才能夠透過練習時的回饋、修正而產生好的動作,但這樣的一對一的 關係必須要有太多的基模來讓我們應付現實的狀況,所以閉鎖理論面對了兩個質
疑,一個是我們需要多少個基模才能夠面對外界的情境呢?而我們的有機體我們 的大腦有辦法儲存這麼多的基模嗎?第二個挑戰與質疑是如果閉鎖環裡頭都是這 樣一個基模對應一個動作,那我們的新動作是如何產生的呢?(K. M. Newell, 1991)在這樣的挑戰與質疑底下,孕育出基模理論的產生背景,閉鎖環理論這樣 一對一的關係在基模理論裡頭,被修正成為一對多的關係,也就是一個運動基模 可以對應多組的動作(K. M. Newell, 1991)。
二、基模理論
基模理論的基模與動作的關係是一個一對多的關係,也就是一個動作基模會 因為不同的參數的輸入而有不同的動作產生(K. M. Newell, 1991),閉鎖環的運動 控制與學習模式在基模理論的原則下,也就變成一個開放環的架構(Schmidt, 1975)。基模本來是一個心理學跟神經學的概念,但一直到Schmidt(1975)年時才 根據閉鎖環理論擴展並將這個概念引用到動作控制與學習上(K. M. Newell, 1991)。
在基模理論裡面一樣有著閉鎖環理論的記憶與再認的關係,這個關係不只是 擴張到一個一對多的關係而已,記憶基模在基模理論裡面比起在閉鎖環理論中扮 演了更重要的角色,記憶基模儲存著過去曾經有過的動作的結果與回饋間產生的 關係的種種經驗,再認基模則去察覺動作基本的協調型態、本體覺所察知的訊息 跟結果間有什麼不一樣(K. M. Newell, 1991)。
基模理論也可以說是是基於訊息處理(information processing)而來的,訊息 處理指的是認知心理學中對人類「知之歷程」的推論性解釋,也就是人類如何經 由感覺器官接受訊息、儲存訊息以及以後如何使用訊息的整個心理歷程。支持訊 息處理的學者,把人類的動作控制視為一種訊息處理的過程(Schmidt,1975)。人 類被看做像一台電腦一樣,訊息就如同是指令,大腦就如同是電腦的中央處理器 一樣,中央處理器中有預先設定好的各種程式,電腦因為訊息而選擇不同的程式,
接著將訊息透過程式的轉譯而輸出一組指令給我們運動神經、肌肉等來執行
(Schmidt,1975)。在這樣的假設底下,大腦扮演主宰的地位,決定一切的行為,
而動作的練習就是要熟悉對執行動作的各種參數,這樣當情境來臨時,也就是訊 號來的時候,大腦才能夠快速地檢索出一組正確的動作程式與參數,以正確地面 對動作的情境,達成想要達成的目標。而這樣的概念底下,動作學習必須透過各 種情境的練習,才能獲得足夠的訊息,以將此動作抽象化、概念化,並形成長期 記憶(Schmidt,1982)。
且在這訊息處理流程中,Donders(1868/1969)認為應該有三個階段(圖2-1):
圖2-1 訊息進行的步驟及形式 (本圖引自:Schmidt & Lee, 2004, p.56)
(一) 刺激確認階段(stimulus-dientification stage):
在這個階段個體必須察覺到情境中所給予的訊息(stimulus detection),這個訊 息可能是進入視網膜的光線或者是進入耳朵的聲音,都必須先轉化為訊號透過神 經到我們的腦子裡,在這時候這個訊號要有用處,必須要能夠激發我們的一些記 憶或與一些過去的經驗作連結(例如,紅燈的訊號就代表著說要停),在這個時候 不少的記憶與經驗會被激發,這樣我們人才能夠從中選擇一些正確的記憶與經驗
刺激確認 反應選擇 反應計畫 個體
反應時間
刺激 動作
來跟這個刺激做正確的連結。除了正確的連結之外,通常這個時候訊號會被歸納 為某種類型的訊號(pattern recognition),例如說一個一個迎面開來的卡車、一顆 快速向眼睛飛來的球,就會被歸納為「快躲」(Schmidt, 2004)。在這個階段個體很 重要的事情是要知道發生了什麼。
(二) 反應選擇階段(Response selection):
當個體知道發生了什麼,並且對這個訊號已經作了分析與連結之後,個體在 這個階段必須要知道如何去反應。例如說棒球被打者打到外野之後,防守者必須 做出是要在空中接殺這個球或者是等他落地之後再去接他,而向這樣的反應與決 定不管是在球場或者是在操作機器、開車上都是的。在這個階段我們常面臨的問 題就是會有多少個選擇,當選擇越多的時候,我們通常就需要越多的反應時間
(reaction time)(Schmidt & Lee, 2004)。
(三) 反應計畫階段(respone-programing stage)
在個體經過前面兩個階段將訊號確認並且決定如何反應之後,就會進入反應 計畫階段,在這個階段裡面個體必須將只有概念性的反應運作成一組肌肉、神經、
骨骼該如何活動的訊號傳遞給我們的相關器官(Schmidt, 2004)。這個階段對我們 的人體是非常複雜的,我們必須從我們的記憶中檢索出已經做出的決定應該要如 何的變成動作,在這個階段中,我們如果已經知道什麼樣的訊息就要用某一種反 應的話,我們的反應時間會比較短;如果我們對於訊息還需要選擇是要用哪一種 反應的話,我們的反應時間則會比較長(Klapp, 1996)。
從閉鎖環理論到基模理論的運動控制與學習,基模跟動作的關係已經從一對 一的關係變成一對多,運動基模只要調整基模內的不同的參數就可以面對同組外 在狀況,達成動作目標。變異練習在基模理論中被是視為是有益的,因為不同的 情境可以讓基模對於訊息的分類與反應的選擇、動作程式的選擇更為熟練(Schmidt, 1991)。相對於閉鎖環理論,基模理論對可以應對解釋到開放性的運動,如球類及 現實生活的各種情境。
三、動力系統(dynamical systems)的學習理論
Bernstein(1967)提出工作自由度(degree-of-freedom)的問題。自由度的概 念裡頭認為人的自由度太多,有大約800條的肌肉,100個以上的關節,而外界的 需要我們反應的動作情境又是那麼複雜,大腦不可能控制那麼多的自由度的變 化,所以應該不是完全由大腦來控制,而是我們人在有著與外在環境互動的關係。
在這個觀點下,動作的練習是促使我們不斷地去練習如何以更有效的策略,
使協調結構去解決達成動作目標的問題。而後Fowler & Turvey(1978)也指出動 作的獲得就是我們搜尋出一個可以解決外在動作的要求的協調結構。我們身體因 應外在環境有自我組織(self-organize)的特性,將許多必須共同動作的自由度壓 縮成為一個協同或協調結構(synergy, coordinative structure),個體只需要控制協調 結構。而動作的學習就是一種我們的感官、動覺、動作與我們希望達到的動作、
環境的挑戰達成一種協調和諧的關係的一種學習(K. M. Newell, 1991)。
成戎珠(1994)指出動力系統理論起源於(1)蘇聯神經生理學家Bernstein在1967 年所提出的動作協調控制理論(the coordination and regulation of movement),(2) 生物學中的系統理論(systems theory),特別是強調非線性的動力系統理論 (3)Gibson的生態心理學(ecological psychology)。也就是說動力系統融合這些理論 的內涵,以數學的方法,探討隨著時間改變時,系統內狀態的改變(Kelso, 1997)。
個體必須與環境互動去尋求有利於它本身的動作,個體必須主動適應環境的限制
(Gibson, 1979)。動作的產生除了刺激反應的結果外,更重要的還有動作與動作情 境之間的關係。
以下分成四點來介紹動力系統:
(一) 生物體是一個複雜、多層次系統(complex, multidimensional system),包 括許多子系統(subsystem),子系統彼此會互動會合作,但這些子系統並沒有一個 從屬上下的關係,也沒有優劣的分別(成戎珠,1994)。這點和「訊息處理論」中 大腦是一切的主宰,由大腦發命令來控制有所不同,但在動力系統中大腦的角色
只被認為是一個子系統,不具有絕對優勢。K. M. Newell(1986)指出影響動作技 能表現的三大子系統為環境(environment)、工作(task)、有機體(organism),這 三種子系統同時也成為三種主要的限制,動作就是這三種限制交互作用而顯形
(emerge)的行為特性。
(二)沒有動作表徵(motor prescription)的存在,動作行為的表現,完全取決於各
子系統彼此互動、交互作用的結果,也就是自我組織的結果。動作會從原本既有 的協調型態,因為練習時環境、工作、有機體的三大限制而演變成另外一種可以 應付動作要求的協調型態,但這些協調型態並非由大腦指揮而成的,是協調組織 搜尋到最佳可以完成動作要求的策略,協調組織以自我組織的方式來達成動作目 標的。如Shapiro等(1981)就發現當人的步伐到達特定的頻率時,就會開始從走 的動作轉換成跑的動作。
(三)協調組織因應外在環境及動作要求自我組織完成後,將會處於一個偏好
(preferred)的狀態,我們可以以吸引子(attractor)來做比喻,吸引子本來是一 個物理的概念,指的就是那較常出現、較穩定的系統狀態,在動力系統理論解釋 人的動作與控制時,也以吸引子來比喻協調組織與外在環境及動作要求處於一個 較穩定的狀態。且我們可以以圖像來比喻吸引子停留的位置,稱之為吸子井
(attractor well)(如圖 2-2)。井的深淺代表著系統由此結構轉換到另一結構的難 易度,深井表示此結構是比較穩定與不容易改變的,如果吸引子在深井中即代表 著要當系統想要轉換成另外一個結構時,就必須有更大的能量投注在上面使其改 變才行,就如同如球在不同深淺的沙洞裡,要讓球離開洞需要不同的能量一樣
(Kamm, Thelen, & Jensen, 1990)。根據動力系統架構,動作學習是一個朝向系統 的固定點演進的過程(K. M. Newell, Liu, & Mayer-Kress, 2001)。當我們看到籃球 賽在最後關鍵時,選手可以不理會全場觀眾的吵鬧聲音,成功地穩定地表現出平
常的水準,將球跳投投進,我們可以稱此選手有跳投的吸引子,即是說他在跳投 的動作上有穩定的表現。
以圖2-2為例:吸引子的穩定性可以當作位能,愈低的位置愈穩定,也就是表 現愈穩定。圖2-2中的A有較高的位能,只要給它小小的力量即可以使它移動,就 像一個選手的動作協調型態是屬於不穩定時,只需要有些外力(如練習),它就會 滾入一個吸子井,進入一個比較穩定的狀態 B在谷底的球處於一個相當穩定的狀 態,如果要讓它移動,必須使它脫離原本的井,相對的要花很多的練習。圖 B 也 說明選手有相當的穩定性,雖然有外力,例如不同的場地、不同的對手等影響,
也不會影響動作表現,即使受到外力的影響仍然會很快地回到原本狀態。在峰谷C 的球之穩定狀態相較於隔壁峰谷的吸引井的位能是比較不穩定,也就是說比較起 來會比較容易改變他的狀態,但這是一個相對的比較。動力系統中對不同吸引子 間的轉換即為轉移,一個選手可經由練習、回饋而使動作技能由一個較不穩定的 吸引子轉移至另一個較穩定的吸引子(Thelen & Smith, 1993)
圖2-2 穩定與不穩定的吸引子(引自Thelen & Smith, 1993)
相對於只有一個吸引子,吸引子的數量可能不止一個。Liu, K. M. Newell, &
Mayer-Kress(2003)使用景觀(landscape)的概念來視覺化多個吸引子的狀態(如 圖2-3),這個以景觀的改變來描述運動學習時的進步情形是源自於Waddington’s
(1957)年時的方法,可以讓我們的動作協調狀態以更立體化的方式來呈現更多
A C
B
子系統交互作用的關係。當我們以這樣三度空間來比擬我們全身整體動作的話,
可以將整體的動作表現視為一「景觀」,新動作學習前,會因為個體發展、經驗等 不同而會有不同景觀,當我們學習一新的技能或動作協調型態時,如同在景觀中,
代表每個子系統的穩定狀態的吸引子在尋找往更深動作谷底的路,而這個尋找的 方式就是練習,若你找到山谷,意味著你的新動作協調型態已是更穩定吸引子,
因為你的吸引子以新協調型態來說是處於比較深的吸引井,就會比較穩定,也就 是說經過更長久的練習,隨吸引子挖深,使得動作技能更加的穩定。子系統在改 變吸引子位置同時,整體的景觀亦隨之改變,也就代表著動作可以從原有的協調 型態轉換成另外一種新的協調型態(K. M. Newell, Liu & Mayer-Kress, 2001)。而除 了一些少部分單肢段的動作學習外,通常一個全身的協調動作都包含了不少子系 統在裡面,例如說打網球時的正手擊球,要學習這個動作的吸引子就可能有肌肉 系統、神經系統、時間空間的準確性等子系統,也就是說會有代表不少子系統的 穩定狀態的吸引子在裡面。而在圖2-3中,景觀中坡度的傾斜程度代表著動作朝向 穩定的谷底的力量,另外一個是滑動的軌道,當軌道是比較平直地到谷底的話,
代表吸引子從原來的狀態的峰頂到新狀態的峰谷中間沒有遭到任何阻礙,也就會 以更快的速度地到穩定的動作技能,而這樣的軌道可能也不一定是直的,可能是 彎曲的。運動學習同時也可以說是透過練習、回饋等讓景觀重整的過程(K. M.
Newell等, 2001)。圖2-3中的甲圖中動作的初始狀態,(A)(B)(C)吸引子在這個圖中 都只能到達第一個谷底,這個第一個谷底相對於峰頂已經是一個比較穩定的狀 態,但相對於乙圖的峰谷就是比較不穩定的狀態。到了 乙圖時,(A)與(B)吸引子 已經能夠到達最深的谷底,但是 (B)有比較快的速度可以到達,因為它遭受的阻礙 與需要的轉折比較少,到了丙圖時,(A)(B)(C)吸引子都已經到達谷底,也就是說 (A)(B)(C)這三個子系統都能夠到達穩定的狀態,這個演進圖同時也說明了子系統 在到達穩定的過程中,並不會以同樣的速率到達穩定的(K. M. Newell等)。
甲
乙
圖2-3 景觀的改變圖(引自K. M. Newell, Liu & Mayer-Kress, 2001, p66)
(四)在動力系統理論中動作是非線性的。系統結構的改變不是呈線性關係,系統 中的各個成分具有緩衝(buffering)能力,以維持系統原有的結構,不會因某種組 成成分的改變(量的改變),系統結構就改變(質,或者說形式的改變)。但當組 成成分的改變(量的改變)達到一個臨界點時,某一特定成分的一點點變化,就 可以將整個系統結構改變成另一個全新的形式(成戎珠,1994)。就像圖2-3的景觀 改變圖,每個子系統代表的吸引子有不同的路徑與速度向穩定的狀態改變,當其 中一個子系統已經到達代表穩定狀態的峰谷時,整個協調型態並無法立刻呈現改 變或不同,必須等到其他的子系統也到達了代表新協調型態的峰谷後,才能夠將 新的協調型態顯現在外(K. M. Newell, Liu & Mayer-Kress, 2001),所以可以說動作 的發展具有非線性的特性,必須要整個型態的子系統的力量超過臨界點後才能夠 呈現,以數學型式及做圖表示的話,就是屬於一個非線性的,也可以說動作的學 習具有非線性的特徵。
丙
四、不同時間刻度下的運動學習
學習是一個透過經驗或練習,造成行為上長久性改變的過程;而技能的純熟 是來自內在、持續的變化所產生的外在表現(Magill, 1998)。這樣一個改變的過程,
多久去觀察這樣的變化比較好呢?不同的間隔去觀察這樣的變化會有什麼不同的 訊息可以看到呢?如果我們與開始的狀態做比較,比較的是練習了一年兩年後進 步的情形,那們我們可以說我們觀察的是比較長時間的變化,也就是我們從比較 長的時間刻度來觀察。時間刻度指的就是這樣的觀察間隔,就像是測量動作系統 改變情形的一把「量尺」,隨著量尺的改變我們可以看到行為改變的不同面。例如,
騎腳踏車這樣的技能在轉移的瞬間很明顯,我們往往可以很清楚地說出我們是在 什麼時候學會騎腳踏車的,這樣的技能用短的時間刻度可以清楚的分辨;但是像 打網球,一項網球的技能的學會是慢慢累積的,如果我們用短的時間刻度來觀察,
往往很難分辨變化的過程,必須從比較長的時間刻度來分辨,因此我們很難說清 楚自己是在哪一天學會打網球的。而對此,K. M. Newell, Liu & Mayer-Kress(2001)
根據動力系統理論架構,主張以時間刻度的角度來探討動作的變化,以下針對時 間刻度屬於長的時間刻度與短的時間刻度做探討。
(一)以長時間連續的變化來看運動學習
我們關注運動學習中長時間而連續的變化,因為這些改變很容易可以注意 到,且觀察長時間的動作學習時,我們學習的路徑不止一種,每個人都可以不同,
且並不需要用同一種方式來學會(K. M. Newell, 1986; Shirly, 1931; Thelen & Smith, 1993 )。我們通常將學習的情形與練習作成學習曲線來呈現,因為曲線圖較能表 示出學習前後的不同,相關的討論也通常集中於該學習CC曲線的行為是屬於哪種型 式的學習曲線學習型態,學習曲線通常可分為指數函數型態、對數函數型態,及S 型函數型態,關於學習曲線的部分將在第二節時探討。
(二)運動學習與發展中短暫的變化
運動學習中有許多種不同的短暫改變,卻往往被忽略掉或者是被平均掉的,
這些短暫現象不像我們之前所提的長時間的改變因為改變明顯而被觀察到,這些 短暫現象通常出現得非常的快,可能只是一組練習中出現,或者不同往常,單獨 出現在學習的過程中。但這些短暫現象可能不只是隨機出現的,這些短暫而重複 的出現的變化可能是具有它的意義的(K. M. Newell等, 2001)。
過去這些逐次的變化通常會被認為是一種干擾,一種噪音,想把它略去不理 會,常見的使用的方法就是把幾次的練習做平均或整回的練習成績平均起來,或 者將不同學習者的成績平均來看,這樣這些短暫被認為是雜訊的訊息就會自然的 消失。這是使用超過一整個世紀的方法,但是這些短暫的變化卻可能不止是噪音 或雜訊而已,這樣的以平均的成績來推論的方式,卻遮蓋掉個人成績資料中的變 化所寓含的意義,但這些改變訊息卻是具有更進一步探討的空間的(K. M. Newell 等, 2001)。
五、小結
早期對於動作學習的看法都是以其它知識學習的看法來解釋,但是 Adams 首 先讓動作學習找到比較符合它自己的解釋,而繼 Adams 的閉瑣環理論後是基模理 論,同樣以大腦為動作命令的起源,認為大腦主宰一切。而還在發展中的動力系 統理論,提供動作學習一個理論基礎,認為人也是宇宙的一部份,應該會符合宇 宙物理的運行原則,另外因為人也有他自己適應環境的方式,所以動力系統理論 結合Gibson的生態心理學,成為自己對於動作學習的看法,動力系統理論從不同的 時間刻度下來看動作的變化,長時間的變化與短時間的變化各有它不同的意義,
但短時間的變化常常是被忽略的,這種被忽略掉的最具代表性的就是暖身減低現 象。目前為止學習理論沒有一個是可以解釋全部的動作控制與學習狀況,但是在 協調、新型態的學習上,似乎動力系統理論的運動學習觀比較能夠廣泛地解釋運 動學習。
第二節 學習曲線
呈現一段時間內行為變化的一個好方法就是以行為的改變值對時間點作圖,
會得到一個點狀分佈圖,而對這些點以適當的函數適配可以加以描述行為的型 態,並得到一個曲線,我們稱為表現曲線,用以描述系統的改變(Cohen, Dunbar, &
MacClelland, 1990; Kramer, Strayer, & Bucklley, 1990; Logan, 1988; R. A. Newell &
Rosenbloom, 1981; Snoddy, 1926)而此曲線能不能真正代表學習的情形呢?只要我 們能夠選擇所觀察變項是對動作改變敏感度高的變項,表現的結果可以當作為學 習的結果(K. M. Newell, Liu, & Mayer-Kress, 2001)。
Snoddy(1926)以鏡相追蹤(mirror-tracing task)的實驗提出學習曲線概念,
以練習者表現與試作的次數各取其對數,得到呈現一個近乎線性的曲線,這也是 研 究 者 所 宣 稱 的 學 習 曲 線 。 學 習 曲 線 的 樣 式 很 多 , 一 般 常 見 的 有 對 數 曲 線
(powerlaw 曲線)、指數曲線(exponential曲線)、S型曲線等(Mazure & Hastie, 1978;
R. A. Newell & Rosenbloom, 1981; K. M. Newell, Liu & Mayer-Kress, 2001 )。而學 習曲線的不同往往代表著動作有不同的型態(Liu, Mayer-Kress, & K. M. Newell, 2004)。
以下將針對兩種常見的對數函數曲線、指數函數曲線做探討。另外學習是個 人的動作行為,但我們研究上常常以群體的成績來研究學習曲線,因此本節也探 討以平均運動學習表現來製作曲線,可能會掩蓋一些重要訊息的情形。
一、對數函數曲線
傳統的練習率所呈現的學習函數為對數函數,一般而言,將表現與練習次數 各取其對數,兩者可得線性關係,用來說明經由練習後表現改變的趨勢(Schmidt &
Lee, 2004)。R. A. Newell and Rosenbloom(1981)甚至宣稱運動學習的進步情形一 定會是一個對數函數曲線。對數函數會持續地進步(如圖2-4),當各個子系統獨立
運作時,其分別有不同的變化率,當子系統獨立運作時表現在外的整體學習曲線 可能為對數函數之型態(K. M. Newell ,Liu, & Mayer-Kress, 2001)。對數函數其基 本的函數形式如公式一。
Y=y
0+aN
rpow(公式一)
Y 是表現結果,
y
0是一個常數,N 是練習次數,r
pow是一個指數。當 N等於 1 時 ,N
rpow 也 等 於 1;這時y
0+a
就 是 起 始 的 表 現 值 ( R. A. Newell &Rosenbloom, 1981)。例如圖2-4是學習者練習飛鏢擲準的60次練習成績(誤差),以 練習成績與次數所做的的點狀分配圖,如當其練習表現呈對數函數曲線特性時,
應該就會像底下的圖一樣,成績會不斷的進步,但是進步的程度緩慢。
次
0 10 20 30 40 50 60 70
誤差
0 5 10 15 20 25
圖2-4 對數函數曲線示意圖
雖然以對數曲線作為運動學習曲線獲得相當多的支持,但是以這個函數來否 決其它形式的曲線是值得商榷的,對數函數也不一定就是唯一依據的做法(Chen, 2002)。早在1978 年,Mazur & Hastie(1978)就指出各種學習函數都可以找得到 符合的資料,而近年來,也有研究者提出以群體或小組的方式將資料加以平均的 做法,容易使得結果偏向對數函數(Myung, Kim & Pitt, 2000)。
二、指數函數曲線
相對於對數曲線的是指數曲線。其基本函數形式如公式二:
Y=y
0+a e
−rexp(n+n0) (公式二)在這個函數中
y
0 是漸近值(asymptote),代表最佳表現;a 是起始的表現;r
exp是改變率;n 代表練習時間(或次數)。指數曲線會快速接近漸近值(如圖2-6)(陳 秀惠,2003);當一個學習者練習擲飛鏢六十次的成績(誤差)與練習次數呈現指 數函數曲線時,就會呈現圖2-5的情形,成績會快速的接近漸近值,在此圖中漸近 值就是17,可是之後的進步幅度就會非常少。
次
0 10 20 30 40 50 60 70
誤差
0 5 10 15 20 25 30
圖2-5 指數函數曲線圖
K. M. Newell ,Liu, & Mayer-Kress,(2001)指出當行為已在動作目標的軌道上 朝向吸引子方向前進時,其變化率為單一改變率,也就是指數函數,因此也可以 用指數函數的學習曲線來證實說目標已經往吸引子的方向前進。K. M. Newell等指 出,在短時間的練習下因為沒有系統的重整下而出現的指數行為,但如果把練習 時間延長,則可能因動作景觀的重整而出現對數行為。
三、以平均方式來判定學習曲線可能會發生的錯誤
有 研 究 指 出 對 數 函 數 是 唯 一 可 以 描 述 動 作 的 學 習 曲 線 ( R. A. Newell
&Rosenbloom, 1981),但為何在傳統的研究中指出對數函數是唯一可以描述學習曲 線呢?相關研究提出可能是因為使用群體資料的平均數所造成的偽訊(Sidman, 1952; Estes,1956 ;Heathcote, Brown, & Mewhort, 2000),但運動學習注重的部分是個 體經由練習後個體表現改變的過程,如果以群體平均數的方式進行學習曲線的繪
製,可能掩蓋掉很多訊息,所以探討個體和群體的學習曲線應該是不同(Estes, 1956;
Kling, 1971; Sidman, 1952;Heathcote, Brown, & Mewhort, 2000)。研究者推論,當系 統已朝向固定點前進時,其時間刻度應為單一時間刻度的指數函數的型態(Chen, 2002; K. M. Newell, Liu, & Mayer-Kress, 2001),但是每位參加者為單一個獨立的個 體,每個人以不同的固定率朝向吸引子,而團體的平均資料形成多個時間刻度,
而將單個時間刻度的現象混雜,將無法看出以單一個改變率前進。所以,以群體 平均數、個體的方式進行學習曲線的繪製應是不同(Estes, 1956; Heathcote & Brown, 2000; Sidman, 1952; Kling, 1971)。在 K. M. Newell等時,也指出練習者本來有各自 的指數函數行為,但是這種不同的指數函數的結果以群體平均的方式,結果變成 了對數函數曲線,原因就是因為平均後被導向對數函數。且值得注意的,平均後 所表現出來的曲線雖然讓雜訊消除了,但也可能掩蓋了這些可能不只是雜訊的短 時間變化所蘊含的運動學習含意(Liu, Mayer-Kress, & K. M. Newell, 2004)。
四、確認學習函數的其它方法—逐次改變率
我們對於學習函數的型態判斷是以學習資料進行統計上的 R2值來判斷,但 是這樣的判斷方式如果遇到太相近的 R2值時,便無法判斷屬於何種學習曲線(Liu, Mayer-Kress, & K. M. Newell, 2004),因此學者也希望如果在 R2值太接近而無法 判斷時,能夠有輔助的方式來協助判斷。逐次改變率的檢查方法就是一種常用的 輔助方法,也稱做R 檢查法,當學習曲線的型態無法以 Rn 2的值判斷時可以當作 輔助判斷的方法(Liu, Mayer-Kress, & K. M. Newell, 2004)。
Liu 等(2004)指出在研究中如果對於學習函數的適配的確是顯示出沒有差 異,正好鼓勵研究者去找出不同的狀況對於學習函數的判斷方法,如可以使用Rn 檢查法 (逐次改變率檢查法)的方法來做判斷。
R 檢查法這種判斷方法是個早就已經被使用的判斷方法,尤其是當我們用來n
決定行為在一段時間的改變是否屬於一個單一的變化情形時候(Liu 等, 2004),
而最明顯而完美的指數函數情形,當然就是以數學統計方式來看資料的改變變化 時,R 值能呈現一直線,也就是改變率呈現固定的狀況(Liu 等)n 。
計算每次改變率R (公式六)n ,分析其斜率作為判定學習函數的另一個方式。
Wn 為第 n 次得分,Wn+1為第 n+1 次得分,Bexp是最佳表現,也就是進行指數 函數適配時所得到的
y
0值。R =(Wn n- Wn+1)/( Wn-Bexp) (公式六)
當我們得到每兩次間的逐次改變率後,我們會將得到的這個值對練習次數(時 間)進行適配,看有無明顯的型態出現,以輔助判斷該技能學習曲線的型態。
五、小結
以學習函數曲線來判斷動作行為是一個有效率的方法,本節探討了指數、對 數學習函數曲線,每一種曲線表現形式對照動力系統分別有其意義存在,也就是 說雖然呈現出的只是曲線型態的改變,但其實已在動作內涵上有了極大的改變,
這個改變也可以說是整個動作的景觀已經重整與否,吸引子是否以處更穩固技能 水準狀態。另外,我們在運動學習上習慣用群體平均後的成績來判斷學習曲線,
瞭解學習情形,但學習是很個人的事,用群體的成績可能讓一些重要訊息混淆,
或者造成誤判,可能會因為平均卻將個人原有的指數函數行為判斷為對數函數行 為,而暖身現象過去的文獻通常也都是以群體成績來看其暖身減低的情形,因此 本研究也將針對群體表現與個人表現的暖身減低情形做研究。最後,當我們無法 以R2值來判斷該學習行為的學習曲線型態時,可以以R 檢查法來輔助判斷 n
第三節 暖身減低現象的相關研究
暖身減低是我們在運動學習過程中常常可以見到的情形,這個現象很早就被 注意並且推測它發生的可能原因,在很多臨場表現上暖身減低的發生常常讓人覺 得困擾,尤其在操作一些危險的器具時,無法以最好的表現操作就有可能發生危 險;當一個運動員從休息區到場上的時候,教練與運動員自己也都會希望能夠用 自己最好的水準來表現,希望暖身減低現象的影響能夠降到最低。而在一些運動 學習的保留測驗時,因為中間會隔著很長的休息時間,當開始想要判定到底學習 保留了多少時,將會很難判斷學習者無法表現得跟練習一樣好是因為學習是效果 不彰或者是因為暖身減低效應的影響。
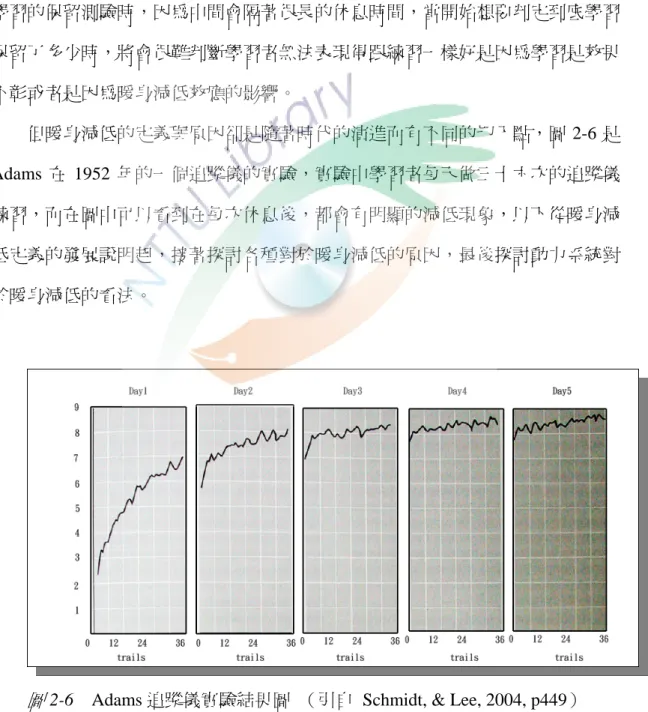
但暖身減低的定義與原因卻是隨著時代的演進而有不同的切入點,圖 2-6 是 Adams 在 1952 年的一個追蹤儀的實驗,實驗中學習者每天做三十六次的追蹤儀 練習,而在圖中可以看到在每次休息後,都會有明顯的減低現象,以下從暖身減 低定義的發展說明起,接著探討各種對於暖身減低的原因,最後探討動力系統對 於暖身減低的看法。
圖2-6 Adams 追蹤儀實驗結果圖 (引自 Schmidt, & Lee, 2004, p449)
一、暖身減低定義的發展
暖身減低很早就被注意到了,最普遍也最簡單被大家所接受的原因就是因為 遺忘,因為休息,所以我們忘記了應該如何做出最佳表現,所以暖身減低最被大 家直覺想到的就是休息之後的第一次表現不如休息前的表現,也以此稱做暖身減 低現象(Adms, 1961)。但是在暖身減低現象的界定上,卻早在 1914 年時,
Thorndike 就有一個影響之後甚多的說法,他說「暖身減低」就是「在休息後,開 始練習或表現時,不斷地提升表現效率的那個階段」;他並說「要降低暖身減低現 象對成績的影響,並不只是單單在表現之前多活動某個器官或肢體就能夠的」,他 指出的這個原因同時也影響到之後對於暖身減低的解釋上(引自 Adams, 1961)。
而在 Thorndike 後,Watson(1919)指出暖身減低現象只會發生在在肌肉活動較 多的行為上,他指出「暖身減低現象」指的是需要一段「時間」來讓表現到達最 佳表現,所以在 Watson(1919)年的定義中,暖身減低現象的消除是需要時間來 回到之前的最佳表現的技能狀態。第二次大戰後,Ammons(1947)指出所謂的
「暖身減低現象」是在休息後第一次表現的成績與休息前一次所評定的技能水準 的差別,這兩者休息前後的成績差別也是普遍所認定的暖身減低現象,而休息後 指的是休息後第一次的表現;跟之前所認定不同的暖身減低定義不同的是 Irion 在 1948 年定義「暖身減低現象」為「在休息後前期表現的進步斜率比起休息前更 高」,在這個定義中,隱含著強調休息之後的表現並不一定會比休息前差,在這裡
「暖身減低」中的「減低」其實只是一個通稱,所以在此「暖身減低現象」指的 是一種現象,是休息後的表現有比較陡的斜率,並不一定是表現得比較好或者是 表現得比較差,定義中指的就是有比較陡的表現斜率的那個階段就稱做「暖身減 低現象」。這種說法,Irion 並不是第一個指出的,在 1912 年時,Arai 就已經指出 來了,也就是說這個在休息之後會有比較急速的成績變化的表現階段,是很早就 被觀察到的(引自 Adams, 961)。所以雖然休息後的初始表現階段常常是表現減 低的,但即使沒有減低仍是在暖身減低的定義的一部份,指的就是休息後的表現
跟休息前比較,會有比較陡的斜率改變。
二、暖身減低發生的原因
雖然「暖身減低現象」並不一定指的是有減低的效果,但是我們都不希望有 這樣的現象產生,最好能夠在休息後,一開始就一樣以自己的最佳技能水準來表 現,因為在比賽的情境中,如果能夠完全沒有減低現象,那麼比賽獲勝的可能性 就會增加。但為什麼會有暖身現象的現象產生呢?暖身減低一開始被認為是因為
「遺忘」而產生的,休息一方面是在調整狀態,一方面卻也是一種干擾,暖身減 低一開始是被認為是在休息時,對於該如何表現出最佳狀態有所遺忘所產生的現 象(Shepherd, 1950), 這個解釋中,暖身現象的原因是單一個因素的,「遺忘」
是唯一的因素,這個解釋也被稱為「遺忘假說」(forgetting hypothesis),因此休息 後因為持續地練習,休息時對於目標行為的「遺忘」,就會再度被喚起記得,所以 表現上昇了回復了,就會回到休息之前的水準甚至有所進步,暖身減低現象只是 另外一個遺忘的形式而已。只是遺忘嗎?卻早就在 Thorndike(1914)時就已經 指出不只是這樣單一因素的影響,Thorndik 認為應該有其它影響的因素在。Irion
(1948)提出集合假說(set hypothesis),這個假說是第一個對於暖身減低提出系 統性解釋的。Irion 的集合假說首先對前面所說的單一因素的看法提出補充,認為 除了遺忘的因素外,一些如肌肉力量、肌肉控制注意力的降低也是造成暖身減低 的重要因素,所以在此時暖身減低的因素從之前的單一因素的影響,加入了「注 意力」的因素,變成是雙因素造成的結果。Irion(1948)做了一個實驗,實驗中 學習者的任務是要做一次口語的記憶,分成兩組,一組在休息時純粹只是休息,
一組卻在休息時唸著一些顏色的字眼,而這些字眼是跟記憶的東西是沒有關係 的,結果是在休息時有做無相關的顏色口語練習的實驗組有比較少的暖身減低現 象,但是一些無相關的顏色的口語練習是跟促進記憶是無相關的。所以 Irion 推測 在學習時,暖身減低的原因不只是因為遺忘,而是一些跟學習相關的肌肉、注意 力有所關係,而休息後的前期,因為練習重新喚醒了對於目標行為的記憶及提升
了在休息時候的注意力,所以在暖身減低階段的表現曲線會有急速的提升(Irion,
1948)。另外一個 Ammons(1951)的實驗也可以證實動作的學習並不只是跟記憶 有關而已,任務是追蹤儀(pursuit rotor)動作的學習,他讓實驗者在休息的時候 觀看其他人追蹤儀的動作,如果暖身減低是因為記憶的關係而已,那這樣子應該 在休息時不至於會對動作有所遺忘,但實驗後發現,暖身減低情形跟控制組並無 不同,因此推論暖身減低的發生原因並不只有「遺忘」的關係而已。
Irion 對於暖身現象的解釋其實反映了當時的心理學解釋的主流,集合假說
(set hypothesis)理論其實是以刺激跟反應的連結這一角度在看待暖身減低,之 所以會有暖身減低的現象,是因為刺激與反應在休息之後彼此的連結不再像休息 前那麼強所導致的,也就是說休息是對刺激與反應中間的連結造成了一種干擾。
只是集合假說理論同時認為暖身減低情形並不一定只是單純因為身體活動的因素 所影響,包含著如注意力這樣的第二項因素(Adams, 1961)。
集合假說理論一直從 Irion(1948)年提出後一直被認為是對於暖身減低現象 最好的解釋,而所謂集合指的就是一種狀態,暖身減低在集合假說理論裡面指的 就是指在休息後對於目標行為的刺激所造成的狀態的減低,集合假說理論著重在 於暖身減低階段的姿勢和注意力上調整(Schmidt & Nacson, 1971)。Schmidt與 Nacson(1971)指出這個集合假說理論對於暖身減低的解釋是還不夠完備的,因 為不論是在Irion或者是之後Adams(1961)年所歸納整理的暖身減低裡,雖然已 經將影響原因擴及至遺忘之外的原因了,但都僅指的是對於目標行為的調整。
Schmidt認為暖身減低的原因還不止於此,因此提出了 活動集合假說理論,用以 解釋暖身減低的原因,Schmidt與Nacson(1971)做了一個實驗,20 位實驗參與 者同時學習一個右手的畫線任務,其中十位是控制者,休息時單純的只有休息,
10 位實驗組在休息時請他們進行左手的抓握活動,結果證實在休息時有進行左手 抓握的實驗組是對於任務的暖身減低現象減少是有所幫助的,所以Schmidt與 Nacson(1971)推測除了記憶、注意力之外,如覺醒程度、動機、身體的整體準