MOTC-IOT-102-SDB001
道路交通事故之
能源消耗與碳排放量推估研究
期末報告初稿
交通部運輸研究所
中華民國 102 年 11 月
目 錄
目 錄 ... I 圖 目 錄... IV 表 目 錄... VI 第一章 緒論... 1 1.1 研究緣起 ... 1 1.2 研究目的 ... 2 1.3 研究範疇 ... 3 1.4 研究流程與工作項目 ... 3 第二章 文獻回顧 ... 7 2.1 車輛能耗與污染排放 ... 9 2.1.1 能源消耗模式 ... 9 2.1.2 污染排放模式 ... 11 2.1.3 污染擴散模式 ... 14 2.1.4 車輛污染排放模式的常用研究方法 ... 19 2.2 車流模式與模擬 ... 27 2.2.1 車流模式 ... 27 2.2.2 車流模擬 ... 35 2.2.3 巨觀及微觀車流模式研究方法 ... 36 2.3 道路交通事故頻次與嚴重度分析 ... 44 2.3.1 事故頻次模式 ... 44 2.3.2 事故嚴重性分析 ... 50 2.3.3 事故頻次與事故嚴重性分析 ... 61 2.3.4 道路交通事故頻次與嚴重度模式研究方法 ... 65 2.4 事故延滯模式 ... 75 2.4.1 等候理論(Queuing Theory)事故延滯推估模式 ... 792.4.2 衝擊波(Shock wave Theory)事故延滯推估模式 ... 82
2.4.3 其他事故延滯推估模式 ... 82 2.4.4 事故延滯推估模式建構方法 ... 83 2.5 事故處理延時 ... 85 2.5.1 歷史事故資料分析 ... 86 2.5.2 事故延時之相關迴歸模式 ... 87 2.5.3 事故延時之相關存活分析模式 ... 88 2.5.4 其他理論應用之事故延時推估模式 ... 93 2.5.5 事故處理延時預測模式研究方法 ... 95 2.6 事故占用車道 ... 100 2.6.1 道路容量降低 ... 100
2.6.2 事故占用車道數 ... 101 2.7 空氣污染之願付價格分析 ... 102 2.7.1 空氣污染之經濟評估現況 ... 102 2.7.2 空氣污染之願付價格相關文獻 ... 108 2.7.3 理論方法與評估經濟價值之文獻 ... 117 第三章 整體分析架構 ... 121 3.1 道路交通事故衝擊分析之系統化架構 ... 121 3.2 道路交通事故耗能及碳排量推估之系統化架構 ... 127 第四章 交通事故特性分析 ... 130 4.1 高速公路 ... 130 4.1.1 高速公路事故資料分析 ... 130 4.1.2 高速公路事故延時分析 ... 132 4.1.3 高速公路占用車道分析 ... 136 4.2 地區道路 ... 136 4.2.1 地區道路事故資料分析 ... 137 4.2.2 地區道路事故資料調查與流量資料蒐集 ... 142 4.2.3 地區道路事故占用車道分析 ... 151 第五章 道路交通事故衝擊分析架構 ... 158 5.1 高速公路事故衝擊分析架構 ... 158 5.1.1 高速公路事故持續時間推估模式 ... 159 5.1.2 高速公路道路容量衝擊設定 ... 168 5.1.3 高速公路事故延滯模式 ... 172 5.2 地區道路事故衝擊分析架構 ... 177 5.2.1 地區道路事故持續時間推估 ... 178 5.2.2 地區道路容量衝擊設定 ... 180 5.2.3 地區道路事故延滯模式 ... 181 5.3 小結 ... 185 第六章 道路交通事故耗能及排碳量推估與分析 ... 189 6.1 能源消耗推估架構 ... 189 6.1.1 道路延滯衍生之能源消耗推估 ... 189 6.1.2 傷者後送醫療能源消耗推估 ... 190 6.1.3 事故排除及調查能源消耗推估 ... 191 6.1.4 其他因事故衍生之能源消耗推估 ... 195 6.2 排碳量及汙染氣體推估 ... 195 第七章 道路交通事故延滯、耗能及排碳量推估分析 ... 196 7.1 高速公路道路交通事故延滯、耗能及排碳量推估分析 .. 196 7.1.1 延滯推估分析 ... 196
7.1.3 排碳量及汙染氣體推估分析 ... 202 7.2 地區道路耗能及排碳量推估分析 ... 206 7.2.1 延滯推估分析 ... 206 7.2.2 能源消耗推估分析 ... 210 7.2.3 排碳量及汙染氣體推估分析 ... 214 7.3 全國道路交通事故耗能及排碳量推估分析 ... 223 第八章 道路交通事故成本推估 ... 226 8.1 汙染價格與時間價值推估 ... 226 8.1.1 國內污染排放量與濃度統計 ... 226 8.1.2 問卷內容與調查計畫 ... 229 8.1.3 願付價格推估方法─Spike 模式 ... 233 8.1.4 問卷資料分析 ... 236 8.1.5 願付價格模式校估結果 ... 245 8.2 道路交通事故成本推估 ... 253 8.2.1 外部成本推估 ... 253 8.2.2 內部成本推估 ... 257 8.2.3 道路交通事故成本分析 ... 260 8.3 道路交通事故成本分析系統 ... 261 8.3.1 系統輸入輸出介面 ... 261 8.3.2 系統分析範例 ... 265 第九章 結論與建議 ... 270 參考文獻 ... 273 附件 1 交通事故調查表 A 及 B ... 1 附件 2 交通事故現場圖建檔之各事故分類抽樣件數 ... 1 附件 3 市區道路事故專家學者座談會會議紀錄 ... 1 附件 4 地區道路路段事故占用道路模式 ... 1 附件 5 地區道路路口事故占用道路模式 ... 1 附件 6 交通事故延滯造成能源消耗及碳排放量之問卷調查-輕度事故 ... 1 附件 7 交通事故延滯造成能源消耗及碳排放量之問卷調查-中度事故 ... 1 附件 8 交通事故延滯造成能源消耗及碳排放量之問卷調查-嚴重事故 ... 1 附件 9 高速公路各類事故平均每件事故延滯、能源消耗及汙染氣體 排放量推估結果 ... 1 附件 10 期中報告審查意見處理情形表 ... 1
圖 目 錄
圖 1.1 研究流程圖 ... 6 圖 2.1 事故碳足跡 ... 8 圖 2.2 小客車之車速(km/hr)與排放係數(g/s)之關係 ... 24 圖 2.3 四行程機車之車速(km/hr)與排放係數(g/s)之關係 ... 24 圖 2.4 線源與風向座標系示意圖 ... 25 圖 2.5 簡單連續流模式流量密度關係圖 ... 28 圖 2.6 格位傳遞模式流量-密度關係圖 ... 29 圖 2.7 格位傳遞模式格位示意圖 ... 30 圖 2.9 格位上下游劃分示意圖 ... 37 圖 2.10 單一車流格位傳遞變數示意圖 ... 38 圖 2.11 混合車流格位傳遞示意圖 ... 39 圖 2.12 車種比例示意圖 ... 41 圖 2.13 行為門檻關係圖 ... 43 圖 2.14 事故延滯之定性簡單模式(均一到達率)... 76 圖 2.15 事故延滯之定性模式(兩種車輛到達率)... 78 圖 2.16 非市場財貨經濟價值分類及評估方法示意 ... 120 圖 3.1 高速公路交通事故衝擊分析架構圖 ... 125 圖 3.2 地區道路交通事故衝擊分析架構圖 ... 126 圖 3.3 道路交通事故耗能及碳排量推估之系統化架構 ... 128 圖 4.1 Kaplan-Meier 事故持續時間存活機率估計 ... 135 圖 4.2 事故現場圖範例 ... 148 圖 4.3 (路段)占用車道數事故件數累積分配圖 ... 150 圖 5.1 高速公路交通事故衝擊分析之系統化架構 ... 158 圖 5.2 逆高斯脆弱對數羅吉斯特 AFT 模式之存活與危險函數... 166 圖 5.3 地區道路交通事故衝擊分析之系統化架構 ... 177 圖 8.1 事故當事者二氧化氮、二氧化碳願付價格及事故受影響者時間 價值情境 Triple-bound 架構圖 ... 232 圖 8.1 道路交通事故成本分析系統參數輸入介面 ... 262 圖 8.2 各縣市件數調整介面 ... 263 圖 8.3 延滯時間推估輸出介面 ... 264 圖 8.4 能源消耗推估輸出介面 ... 264 圖 8.5 系統輸入參數範例 ... 265 圖 8.6 系統輸出範例 ... 266 圖 8.7 系統延滯時間推估輸出範例 ... 267 圖 8.8 系統能源消耗推估輸出範例 ... 267 圖 8.9 縣市別事故改善輸入範例 ... 268圖 8.10 縣市別事故延滯時間改善範例 ... 269 圖 8.11 縣市別事故能源消耗改善範例 ... 269
表 目 錄
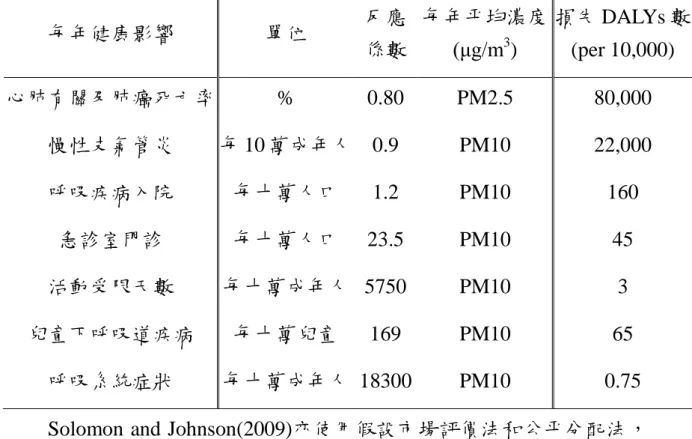
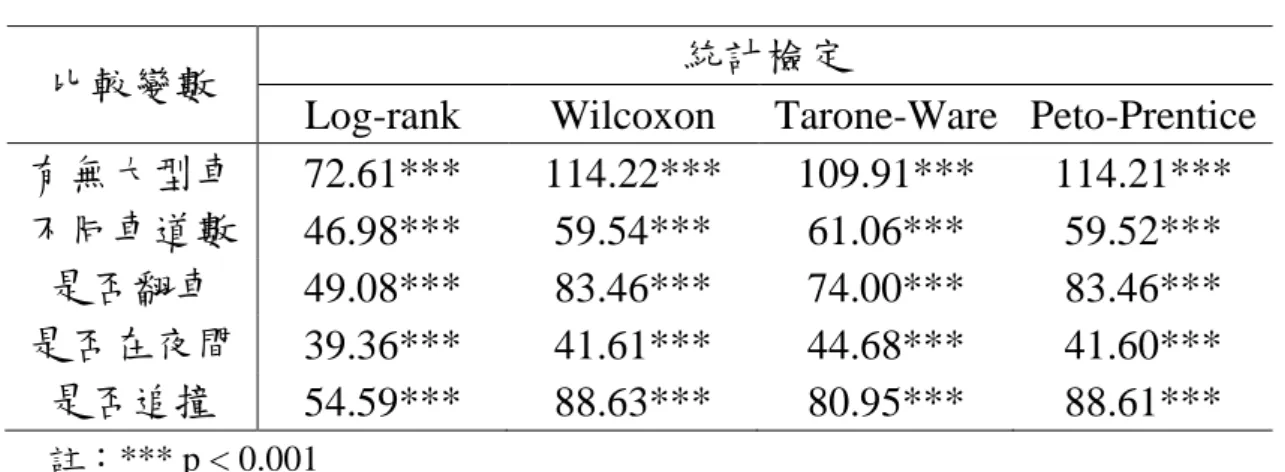
表 2-1 物理擴散模式特性 ... 15 表 2-2 小客車排放係數(克/公里.輛) ... 23 表 2-3 巨觀車流模式整理 ... 31 表 2-4 各類事故占用車道數之比例 ... 102 表 2-5 空氣污染(TSP 及 SOx)環境質損之編算結果 ... 105 表 2-6 空氣污染(NOx 及 NMHC)環境質損之編算結果 ... 105 表 2-7 國內固定污染源徵收價目表 ... 106 表 2-8 彙整中國其他關於空氣品質的相關研究 ... 112 表 2-9 伊朗衛生部門統計 PM10 及 PM2.5 影響肺癌及心肺疾病之反 應係數及 DALY ... 113 表 3-1 道路特性分類表 ... 122 表 3-2 事故型態分類 ... 123 表 4-1 事故型態分布 ... 130 表 4-2 2010 年國道主線事故分布 ... 131 表 4-3 2010 年國道匝道事故分布 ... 132 表 4-4 2010 年國道交通事故持續時間 (分) 基本特性 ... 133 表 4-5 國道高速公路 2010 交通事故與持續時間 ... 133 表 4-6 存活函數之比較檢定 ... 136 表 4-7 國道高速公路 2010 事故占用車道數統計 ... 136 表 4-8 地區道路事故年度件數分布 (台北市部分) ... 137 表 4-9 地區道路事故年度件數分布 (新北市部分) ... 138 表 4-10 事故發生時段與嚴重度分析表 (單位:件) ... 139 表 4-11 事故牽涉車輛數與嚴重度之交叉分析 (單位:件) ... 139 表 4-12 事故道路型態與嚴重度之交叉分析 (單位:件) ... 140 表 4-13 事故位置與嚴重度之交叉分析 (單位:件) ... 141 表 4-14 事故類型及型態與嚴重度之交叉分析 (單位:件) ... 142 表 4-15 調查表回收情形 (單位:件) ... 144 表 4-16 事故嚴重度與時間長度敘述性統計表 (單位:分) ... 145 表 4-17 事故嚴重度與車流狀況交叉分析表 (單位:件) ... 145 表 4-18 每次事故投入救援資源 (單位:輛) ... 146 表 4-19 事故嚴重度與救援資源交叉分析表 (單位:輛) ... 146 表 4-20 地區道路事故現場圖抽樣分類情形 ... 148 表 4-21 時相代號說明 ... 149 表 4-22 路口/路段事故與事故嚴重度 (單位:件) ... 150 表 4-23 地區道路路段事故占用車道數統計 ... 152 表 4-24 天候與路段占用車道數交叉分析 ... 152表 4-25 有無牽涉大車與占用車道數交叉分析 ... 153 表 4-26 牽涉車輛數與占用車道數交叉結果 ... 153 表 4-27 事故類型及型態與占用車道數交叉結果 ... 154 表 4-28 地區道路路口事故格子數統計 ... 155 表 4-29 天候與路口占用格子數交叉分析 ... 155 表 4-30 牽涉車輛數與路口占用格子數交叉分析 ... 156 表 4-31 有無牽涉大車與路口占用格子數交叉分析 ... 156 表 4-32 號誌種類與路口占用格子數交叉分析 ... 157 表 5-1 高速公路事故延滯模式解釋變數一覽表 ... 161 表 5-2 第一階段加速失效模型校估結果 ... 164 表 5-3 第二階段加速失效模型校估結果 ... 165 表 5-4 兩階段模式之概似比檢定 ... 165 表 5-5 逆高斯脆弱羅吉斯特模式變數之邊際效果 ... 167 表 5-6 事故持續時間推估結果(分鐘) ... 167 表 5-7 占用車道模式解釋變數一覽表 ... 169 表 5-8 占用車道數順序性羅吉特模式校估結果 ... 171 表 5-9 占用車道數分布 ... 172 表 5-10 延滯推估模式參數設定表 ... 173 表 5-11 國道平均流量(車輛數/小時) ... 175 表 5-12 延滯估計結果(小時) ... 176 表 5-13 反應時間推估 (單位:分鐘) ... 178 表 5-14 現場處理時間與事故持續時間推算 ... 179 表 5-16 道路流量分類 ... 183 表 5-17 各道路分類之平均流量值(單位:輛) ... 184 表 5-18 道路交通事故衝擊分析架構 ... 186 表 6-1 各縣市救護車服務範圍推估 ... 191 表 6-2 各縣市分局及派出所服務範圍推估 ... 193 表 6-3 二氧化碳及其他汙染物排放係數 ... 195 表 7-1 高速公路事故延滯推估結果(萬車小時) ... 197 表 7-2 發生延滯件數 ... 197 表 7-3 平均每件事故延滯估計結果(車小時) ... 199 表 7-4 99 年高速公路事故道路衝擊能源消耗(公秉) ... 200 表 7-5 99 年高速公路事故總能源消耗(公秉) ... 200 表 7-6 平均每件事故能源消耗估計結果(公秉) ... 201 表 7-7 二氧化碳及污染氣體推估結果(公噸) ... 202 表 7-8 99 年高速公路事故總碳排(公噸) ... 202 表 7-9 平均每件事二氧化碳估計結果(公斤) ... 203 表 7-10 平均每件事甲烷估計結果(公斤) ... 204
表 7-11 平均每件事氮氧化物估計結果(公斤) ... 205 表 7-12 各類事故件數 ... 207 表 7-13 平均事故延滯 ... 207 表 7-14 各縣市 A1、A2 及 A3 件數 ... 208 表 7-15 各縣市 2012 年事故延滯(萬車小時) ... 209 表 7-16 各縣市 2010 年事故延滯(萬車小時) ... 210 表 7-17 平均事故道路衝擊能源消耗(公升) ... 211 表 7-18 各縣市 2012 年事故道路衝擊能源消耗(公秉) ... 211 表 7-19 各縣市 2010 年事故道路衝擊能源消耗(公秉) ... 212 表 7-20 各縣市 2012 年地區道路事故總能源消耗(公秉) ... 213 表 7-21 各縣市 2010 年地區道路事故總能源消耗(公秉) ... 214 表 7-22 各縣市 2012 年事故道路衝擊二氧化碳排放量(公噸) ... 215 表 7-23 各縣市 2010 年事故道路衝擊二氧化碳排放量(公噸) ... 216 表 7-24 各縣市 2012 年事故道路衝擊甲烷排放量(公噸) ... 217 表 7-25 各縣市 2010 年事故道路衝擊甲烷排放量(公噸) ... 218 表 7-26 各縣市 2012 年事故道路衝擊氮氧化物排放量(公噸) ... 219 表 7-27 各縣市 2010 年事故道路衝擊氮氧化物排放量(公噸) ... 220 表 7-28 各縣市 2012 年事故道路衝擊總二氧化碳排放量(公噸) ... 221 表 7-29 各縣市 2010 年事故道路衝擊總二氧化碳排放量(公噸) ... 222 表 7-30 2010 年全國道路交通事故總耗能(公秉) ... 224 表 7-31 全國道路交通事故二氧化碳排放量(公噸) ... 224 表 7-32 全國道路交通事故甲烷排放量(公噸) ... 225 表 7-33 全國道路交通事故二氧化氮排放量(公噸) ... 225 表 8-1 不同污染源於各部門之總量統計(TEDS 7.1 版) ... 227 表 8-2 統計各縣市二氧化氮排放總量(單位:公噸/年) ... 227 表 8-3 空氣污染濃度與健康影響 ... 229 表 8-4 社會經濟特性分析(1) ... 237 表 8-5 社會經濟特性分析(2) ... 238 表 8-6 旅次特性分析(1) ... 239 表 8-7 旅次特性分析(2) ... 240 表 8-8 環保活動及身體況狀分析 ... 241 表 8-9 二氧化氮願付價格分析 ... 242 表 8-10 二氧化碳願付價格分析 ... 243 表 8-11 時間價值願付價格分析 ... 244 表 8-12 二氧化氮願付價格之單變數模式校估結果 ... 246 表 8-13 二氧化氮願付價格之多變數模式校估結果 ... 248 表 8-14 二氧化碳願付價格之單變數模式校估結果 ... 249 表 8-15 二氧化碳願付價格之多變數模式校估結果 ... 250
表 8-16 時間價值願付價格之單變數模式校估結果 ... 251 表 8-17 時間價值願付價格之多變數模式校估結果 ... 252 表 8-18 2010 年全國道路交通事故時間成本(百萬元) ... 253 表 8-19 2010 年全國道路交通事故能源消耗成本(百萬元) ... 254 表 8-20 2010 年全國道路交通事故二氧化碳汙染成本(百萬元) ... 254 表 8-21 2010 年全國道路交通事故二氧化氮汙染成本(百萬元) ... 256 表 8-22 2010 年全國道路交通事故外部成本(百萬元) ... 257 表 8-23 交通事故之每人/每車死傷之平均成本 ... 258 表 8-24 2010 年道路交通事故之總內部成本推估結果 ... 259 表 8-25 2010 年道路交通事故之總成本推估結果 ... 260 表 8-26 泰國、英國、加拿大、美國 2010 年道路事故成本佔 GDP 百 分比之統計 ... 261
第一章 緒論
1.1 研究緣起
目前我國對於車輛運行與能耗及汙排等環境議題,已有相當廣泛 且豐富之研究,但進一步考慮交通安全與環境保護間之相關研究則相 當有限。而且,交通安全相關研究課題大多著重於交通事故之預防及 肇事因素之分析。事故發生後所造成之影響則仍尚待相關研究進行探 討。其中道路交通事故從經濟面衡量可能造成傷亡與財產之個人損失, 或因勞動力減損而致社會經濟面損失,已為相關交通安全研究所重視 之課題。惟從更廣義之環境面而言,事故所產生之車流延滯衝擊,亦 將直接影響能源消耗與碳排放量之增加,此部分之研究仍有待強化。 一般而言,造成車流延滯之原因主要可分為重現性(recurrent)以 及非重現性(non-recurrent)兩類型。其中,重現性車流延滯大多源自尖 峰交通車流所形成之擁塞,以及路口號誌控制等因素。至於非重現性 車流延滯則大多源自不可預期之道路交通事故及交通事件(掉落物、 車輛故障),以及可預期之道路施工車道封閉等。因為重現性擁塞可 透過歷史交通資料及交通控制策略之彙析,來加以推估與預防。至於 非重現性的道路封閉施工亦能預先得知,並加以因應。但道路交通事 故及交通事件所造成之非重現性擁塞,則因發生時空難以預測,故較 難預估與防範。因此,也引起相關多的研究進行如何有效降低此類車 流延滯衝擊的探討。其中,尤以同時造成道路交通運行效率及安全的 交通事故,更是研究核心。 道路交通事故除直接造成生命財產之損失(內部成本)外,也間 接造成道路交通延滯、能源消耗,以及污染排放(外部成本)。因此, 要正確衡量道路交通事故之社會成本,必須同時包括內部及外部成本 之推估,方能進行道路交通安全改善計畫之完整效益評估。基此,交 通部運輸研究所已於 101 年進行「道路交通事故成本推估之研究」。 該研究乃針對道路交通事故之當事人生命財產損失成本加以推估。但 因事故而衍生的延滯、能耗及汙排等社會外部成本,則尚未建立完整之推估架構與方法,以完備事故整體社會成本之推估,確有其必要性。 而我國雖曾有部分研究探討道路交通事故與車流延滯之關聯,惟未進 一步就其對能源消耗與碳排放量所產生的影響加以推估。因此,在節 能減碳之交通管理應用策略上,實有必要先就我國道路交通事故所衍 生整體能耗與碳排放等外部成本進行推估,期作為評估特定先進交通 管理應用技術對降低交通事故之成本效益基礎。
1.2 研究目的
基於上述之研究背景與動機,本計畫主要研究目的有三: 1. 由於道路交通事故發生的型態、地點、嚴重程度均不相同, 對於當時交通運行所產生的衝擊亦不相同,透過系統化的概 念,將不同道路型態、事故衝擊範圍,運用相關車流分析理 論或模擬技術,連結相關之耗能與碳排放推估參數,以建立 整體性之分析架構,並進而加以實證推估。 2. 推估不同的道路體系以及不同的道路事故所產生的能源消耗 與碳排放量,提供道路管理單位做事故預防、易肇事路段防 制評估及管理之參考,以同時兼顧效率與安全。 3. 就我國道路交通事故所衍生整體能耗與碳排放等外部成本進 行推估,期作為評估特定先進交通管理應用技術對降低交通 事故之成本效益基礎。1.3 研究範疇
根據本計畫主要目的,透過系統化的概念,將不同道路型態、事 故衝擊範圍,運用相關車流分析理論或模擬技術,連結相關之耗能與 碳排放推估參數,以建立整體性之分析架構,並進而加以實證推估。 本計畫之範疇將著重於事故車流模式之建立、能耗與碳排放之推估, 以及事故外部成本貨幣化之估算,將以挑選國內市區道路及高速公路 作為分析對象,並蒐集不同道路類型之幾何設計資料及車流量資料進 行分析並彙整成模式應用之參數。最後並針對市區道路及高速公路篩 選事故發生頻率較高之路段及地點,進行實際案例之分析,以提供相 關單位之應用與參考。1.4 研究流程與工作項目
本計畫預定完成之工作項目如下: (一) 建立道路交通事故衝擊分析之系統化架構 1. 透過廣泛蒐集國內外研究與文獻,針對道路交通事故的類型、 定義、範圍、衡量項目、衡量方法等,建立交通事故衝擊分 析之系統化架構。 2. 針對不同道路型態(如高速公路、省縣道、市區道路等),界 定道路交通事故之衝擊範圍與可用之參數(如事故的類型、影 響車道數、影響時間、影響車輛數及車種、交通控制系統等), 以建構整體道路系統之交通事故衝擊類型化分析。 3. 評估所需應用之分析方法及技術(如車流模式、等候理論、模 擬技術等)。 4. 蒐集交通衝擊分析所需資料,研析不易蒐集資料之克服方法 或替代方案。(三) 建立整合道路交通事故耗能及排碳量推估之系統化架構 1. 參考國內外及國內既有之耗能及排碳量推估研究,連結交通 衝擊分析與耗能及排碳量推估分析,建立系統化之架構。 2. 明確界定系統化整合分析架構之輸入/輸出變數、參數以及系 統關聯性。 (四) 國內道路交通事故之耗能及碳排放推估分析 1. 蒐集交通衝擊分析、耗能及碳排放推估所需變數及參數。 2. 運用前述系統分析架構、分析方法及技術,針對特定事故類 型、特定道路及整體道路所發生交通事故之能源消耗及碳排 放量進行推估。 3. 說明分析結果,並透過分析資料進一步提出推估研究之應用 價值與意涵。 由於道路交通事故發生後,除直接影響當事人之生命財產外,事 故所造成的車道阻塞亦對上游車流形成干擾,導致其他用路人的額外 延滯。延滯除帶來駕駛人時間成本的損失,亦會對環境造成影響,因 此,推估事故造成的汙染排放及能源消耗,實有其必要性。基此,本 計畫之研究流程如圖 1.1 所示。 本計畫主要針對道路交通事故衍生之能源消耗與碳排放量進行 推估,為充分了解國內外對於此課題之研究內容,彙析國內外車輛能 耗與污染排放、車流模式與模擬、道路交通事故對車流之衝擊、道路 交通事故頻次與嚴重度分析及空氣汙染之願付價格分析等文獻,分別 就車流模擬、環境衝擊、事故影響及成本分析等課題,回顧相關文獻 及研究方法,以利後續研究能獲得更多啟發及應用。 事故發生類型種類繁多,不同的道路特性其發生之事故型態亦有 差異,為使本計畫聚焦重要課題上,將道路型態、事故類型、衝擊範 圍事先進行界定。透過範圍界定及資料蒐集,並以車流模式為基礎, 將模擬車流行為之輸出參數,如速率、流量及密度等,代入汙染排放
及能源消耗推估模式,以推估排放量及能源消耗。此外,透過車流模 式亦可推估延滯時間及延滯時間成本。而汙染排放成本可藉由排放量 與污染排放價格換算,但此成本是根據汙染對環境造成的成本推估而 來,尚未有研究探討用路者對於空氣汙染之願付價格。因此,本計畫 於環境影響成本分析加入空氣汙染願付價格,除可以推估環境衝擊的 成本,亦可推估用路者對於汙染影響之成本。另外,本計畫亦導入環 境補償之概念,過去肇事者僅須賠償受害者,但忽略周遭環境亦受到 事故傷害。因此,肇事者應對環境的破壞進行賠償。而本計畫將進一 步透過空氣污染願付價格分析,探討肇事者願意對環境污染賠償之額 度。 最後本計畫依據建構之事故車流模式、汙染排放模式及能源消耗 模式,分別針對高速公路及地區道路分別進行案例分析及統計彙整。 並將相關參數代入本研究所建立之模式中,以分析汙染排放及能源消 耗成本,以作為相關單位研擬改善方案之參考。最後綜整各部份推估 與分析結果,作成結論與建議。
計畫開始 計畫目的、範圍及 工作項目確認 文獻回顧 車輛能耗 與污染排 放 車流模式 與模擬 道路交通事 故對車流之 衝擊 道路交通事 故頻次與嚴 重度分析 空氣污染之 願付價格分 析 交通事故道路型態、事故類型、交通事故之衝 擊範圍界定 事故衝擊車流模式 建構 事故衝擊參數 蒐集 道路參數蒐集 事故能耗及碳排量 推估 事故衝擊環境成 本推估 能耗及碳排成 本推估 延滯時間成本 1.空氣汙染願付價 格推估 2.時間價值推估 問卷調查 事故衝擊 外部成本推估 案例分析 結論與建議 高速公路事故 市區道路事故 圖1.1 研究流程圖
第二章 文獻回顧
從交通安全的角度來看,道路設施是道路環境組成之一環,其設 置的目的在於提供車輛駛人及行人有關道路路況之警告、禁制、指示 等資訊,以及道路照明、行車指引與安全防護等功能。若道路設施設 置不當,將可能提高道路環境的風險,觸發駕駛人發生交通事故的可 能性與嚴重性;而事件的發生,更造成非重現性交通的擁擠,衍生出 事故排除所需的車輛移除與緊急救護作業,紓解車流所需的交通維持 作業,以及後續車輛與設施的損毀修復、交通事故調查與後續行政、 傷者後續照護等。包括: 1. 非重現性交通擁擠 當事故發生時會產生非重現性交通擁擠,進而造成後方車輛延滯 增加,並增加燃油消耗;此外,部分駕駛人可能採取繞道而行的方式, 改變行車路徑可能會增加旅行時間,進而增加油耗。 2. 事故排除 為排除事故,必須由警察到場進行初步調查建檔,同時必需派遣 機具與相關人員 (例如拖吊車等) 將車輛移除現場,在人員與機具的 派遣過程當中會增加交通旅次,以及相關車輛設備的燃油消耗。 3. 傷者後送醫療 若事故造成人員傷亡,必需派遣救護人力與設備車輛至現場,因 而造成交通旅次增加與燃油消耗,此外,後續醫療行為與藥物醫材消 耗也會消耗資源增加碳排放。 4. 設施損毀 事故現場若造成設施損毀,首先必須將現場隔離進行修復,期間 車流受到施工影響會產生延滯,造成額外的燃油消耗;而設施本身修 復過程也需要耗費資源與人力進行生產與維修。5. 車輛損毀 事故造成車輛損毀的修復過程,需要消耗資源生產相關零件,以 進行車輛的維修工作。 6. 事故調查與後續行政 後續事故調查、保險理賠程序、法律責任釐清等需要人力投入, 行政程序則會產生諸如書面作業、文件傳送等相關活動以及對應之資 源消耗。 7. 傷者後續照護 事故傷者後續醫療必須持續投入資源進行照護,若事故造成永久 性損傷,更需增加長期照護人力以及相關醫護設備,進而衍生額外資 源的消耗。 綜整而言,良好的道路安全設施,除可減少事故發生與嚴重程度 外,如圖 2.1 所示亦可減少因事故發生而增加的燃油消耗與交通旅次 需求,進而減少二氧化碳排放量。 道路交通事故碳足跡 非重現性交通 擁擠 事故排除 傷者後送醫療 設施損毀 車輛損毀 事故調查與 後續行政 傷者後續照護 • 車輛延滯 • 改變行車路線 • 增加旅行時間 • 派遣機具 • 派遣人員 • 派遣救護設備 • 派遣救護人員 • 醫療處置 • 藥物、醫材消 耗 • 行車阻礙 • 派遣施工人力 • 設施汰換修復 • 派遣維修人力 • 零件生產 • 車輛修復作業 • 派遣調查人力 • 現場調查 • 行政作業 • 保險理賠 • 增加替代運具 需求 • 長期照護人力 增加燃油消耗 增加交通旅次需求 消耗資源 碳排放 圖2.1 事故碳足跡
2.1 車輛能耗與污染排放
2.1.1 能源消耗模式 在都市交通管理策略中,透過改善機動性及減少延滯降低能源消 耗。美國有效的時制設計,每天可節約五百萬加侖的油料。此外,在 美國的所有能源消耗中,有 45%的比例是來自於路上車輛的能源消耗。 因此,能源消耗逐漸成為衡量交通管理策略的重要效率指標之一。而 從 1970 年開始,有許多車輛能源消耗的研究,建立多種類的能源消 耗模式,此部分將介紹能源消耗與交通運輸相關文獻。 2.1.1.1 車輛能源消耗之影響因素 主要的影響能源消耗有四個影響因子,分別為車輛因子、環境因 子、駕駛人因子與交通因子。在交通因子考量的變數有:速率、站牌 數、行駛噪音與加速噪音等。而駕駛人的侵略性駕駛行為,也進一步 影響了能源的消耗比例。環境因子影響能源消耗的變數包括:道路坡 度、風向、周圍溫度、海拔高度、鋪面型式與路面狀況等。影響能源 消耗的車輛因子變數包括:車重、引擎大小、引擎類型、變速器類型、 輪胎類型、胎壓、煞車狀態、汽化器系統、引擎溫度、汽油類型、車 輛形及車上的附屬電子用品種類等。 2.1.1.2 能源消耗模式內容 透過一系列的車輛特性、駕駛人特性及環境等可以建立一交通相 關因子影響的能源消耗模式。在英國(Everall 1968)、澳洲(Pelensky etal. 1968)、美國(Chang et al. 1976; Evans and Herman 1978; Evans et al.
1976) 等地都有研究指出可以藉由建立一個線性函數式估計每車單 位距離在都市區相對於車輛平均速率之能源消耗量。其中 Evans et al. (1976)研究建立的模式涵蓋了 16 種可能影響能源消耗量的交通變數, 該研究統計車輛車速變數就可以解釋 70%的車輛能源消耗變異程度。 此外,研究也顯示當速率大於 55(公里/小時)時,動力情況因素對能 源消耗比例將會產生累加的影響。因此該研究將交通情況分成都市道 路(速率小於 55 公里/小時)和公路(速率大於 55 公里/小時)兩種類別後,
2.1.1.3 都市道路能源消耗模式
Herman and co-workers (Chang and Herman 1981; Chang et al. 1976; Evans and Herman 1978; Evans et al. 1976) 根據上述理論建立 了一個簡單的市區道路之線性函數,探討每單位距離的平均旅次時間 與能源消耗的關係。此模式又被稱為「Elemental Model」,公式如下: Φ = K1+ K2T , V < 55 𝑘𝑘/ℎ𝑟 (2-1) 其中Φ:每單位距離之能源消耗,T:每單位距離之平均旅行時 間,V(=1/T):平均速率。K1(in mL/km)表示克服旋轉摩擦力所需之能 源,大小與車輛質量因素相關。K2(in mL/sec)為調整模式準確度之係 數。Akcelik and co-workers (Akcelik 1981;Richardson and Akcelik1983) 則建立了另一個模式,分別估計車輛在行駛階段、停等階段及加減速 階段將產生多少能源消耗,此模式的都市道路能源消耗公式為: F = 𝑓1Xs + 𝑓2ds + 𝑓3h (2-2) 其中,F = 每道路區段之平均能源消耗(mL),Xs = 總區段距離 (km),ds = 每車輛平均停等延遲(secs),h = 每車輛平均停靠數,f1 = 行駛階段能源消耗率(mL/km),f2 = 停等階段能源消耗率(mL/sec),f3 = 每車輛停靠之超額能量消耗(mL)。 2.1.1.4 公路能源消耗模式
Vincent et al. (1980)與 Post et al. (1981)在一致的行駛速率基礎下 各建立能耗模式。其中,Vincent et al.(1980)所建立的模式為: 𝑓c = a + bVc + cVc2 (2-3) 其中,Vc = 平穩狀態行駛速率,𝑓c = 平穩狀態行駛速率下之能 源消耗,a = 170 mL/km,b = -4.55 mL-hr/km2,c = 0.049 mL-hr2 /km3。 Post et al. (1981)建立的平穩狀態能源消耗模式,公式為: 𝑓c = b1+ b2/Vc + b3Vc2 (2-4) 其中,b1 = 15.9 mL/km,b2 = 2520 mL/hr,b3 = 0.00792 mL-hr2/km3。
有鑑於車輛能耗推估模式之重要性,交通部運輸研究所近年來也 已分別針對國內之自用小客車、營業用大客車,以及重型及輕型機車 蒐集其在不同道路與交通環境下之能耗與行駛速度關係式,亦足供推 估車輛運作或停等之能耗。 2.1.2 污染排放模式 空氣污染排放量的推估可有以下幾種方法:直接推估方法、質量 平衡法、工程計算法與間接推估方法。其中,直接推估方法是較為可 靠的方法,但惟獨成本較高故僅能夠針對部分重要地點進行有限的實 測;而最方便及最常使用的方法係利用間接推估法,亦即排放係數法 進行推估。以排放係數法進行排放量推估之基本公式如下: 排放量 = 排放係數 × 活動強度 × 控制因子 (2-5) 「排放係數(或稱排放因子;Emission Factor)」之定義為每單位 生產量(能源消耗或服務量)所排放之空氣污染物之量;「活動強度 (Activity Intensity)」是指一段時間內之生產量(或能源消耗量或服務量) 大小,主要配合排放係數之單位項目代入推估;「控制因子」係指污 染源受到控制後與控制前之排放量比值。然而針對移動污染源排放量 之計算方法則將算式改為: 排放量 = 排放係數 × 車輛行駛里程 × 車輛數 (2-6) Bachman et al.(2000)在研究中指出行駛模式、引擎 CC 數、車齡、 行駛里程數與排氣控制設備等車輛特性皆為影響污染排放係數的重 要因素。Joumard et al.(1995)亦嘗試利用不同車輛運行特性之速度與 加速度建構排放模式。而用以評估移動污染源排放係數主要有兩種模 式:MOBILE 排放模式與 COPERT 排放模式。
COPERT(Computer Programme to calculate Emissions from Road Traffic)係由歐盟環保署(EEA)所資助發展而成的車輛污染推估模式, 其所能推估之污染物的範圍相當廣泛,該模式將污染物主要分成四大 類,第一類包括 CO、NOx、VOC(揮發性有機化合物)、PM(懸浮微粒)、 CH4(甲烷)等。第二類包括 CO2、SO2 以及 Pb、Cr 等重金屬污染物。
第三類包括 NH3、N2O、PAHs、POPs、PCDDs、CDFs 等。第四類 將非甲烷揮發性有機物(NMVOC)細分成烷類、烯類、炔類、醛類等。 但其中僅第一類污染物是以車輛實際測試的方式建立其相關資料,其 餘三種污染物類別之排放推估則是以其他污染源模式做為其主要之 推估依據。在車種方面,COPERT 推估模式所能包含之車種種類亦相 當廣泛,分類方法相當複雜,主要包含以下幾種車型:Passenger cars、 Light-duty vehicles(<3.5t)、heavy-duty vehicles(>3.5t)、Bus、Mopeds 與 Motorcycles。每種車種再依據使用之燃料、排氣量大小、車重、 出廠年份分成若干個次類別。在計算車輛的污染排放源中係以車輛之 冷啟動、熱穩定及蒸發污染這三大項之和作為其污染排放係數,其中 以冷啟動以及熱穩定屬於車輛運行特性之排放係數,因此兩者的建構 方式是以不同的行車型態中利用速度的差異建構一車速與排放量間 之關係。 MOBILE 程式係由美國環境保護署(US-EPA)所發展,針對八種不 同車型種類進行排放係數之推估。藉由不同車種的基本排放係數、車 輛組成特性、車輛啟動特性、燃料特性等因素,以及五種不同的排放 型態,估算 CO、HC 以及 NOx 之平均排放係數。目前此模式發展至 今經多次修正後發展至 MOBILE 6.2,對於過去之模式已有大幅度的 修正。而我國目前主要在排放係數的推估上,係使用中鼎顧問公司所 開發之 MOBILE-Taiwan 2.0,主要是將美國之 MOBILE 模式中部分 參數本土化。 而近年來,我國環保署為提升全國排放量資料庫之品質,著手加 強推動各縣市之排放資料庫之正確以及完整性,並規劃每三年進行一 次全國排放量更新工作。於 93 年度之計畫中以 92 年為基準年排放量 進行 TEDS6.0 版之建置,並於 95 年度完成 TEDS6.1 版之 92 年基準 年排放量更新。97 年度著手完成完成 TEDS7.0 版大幅度的排放量更 新推估,此版本以 96 年為基準年進行資料庫之更新,並於 98 年完成 建置。
Marmur and Mamane(2003)利用兩種資料庫以推估移動污染源之 排放因子,並以 FTP 的行駛型態作為排放模型的基本設定,進行排
放模型之推估與實際排放資料之比較,實際之排放因子是來自隧道實 際行駛條件下所蒐集建立。文中是以以色列三條快速道路作為研究之 地點,主要排放模式採用 COPERT 與 MOBILE 來推估 NOx 排放係數 並與實際排放資料相互比較,結果發現因不同車種組成比例對於整體 排放係數之推估也會有所差異,MOBILE 5b 的推估適用於柴油車輛 比例較高的情況,而綜觀而言 COPERT3 是以色列地區較為適用的模 式。
Xia and Shao(2005)嘗試針對香港地區建立一巨觀車流模式用以 模擬區域之車流情況。模式中考量了道路上之車種比例,並藉由此比 例計算出道路上各種車種之 CO、NOx與 PM2.5之排放量,而排放係 數是利用 COPER2 之方法來估計。並針對有偵測器之區域進行排放 量之推估,而利用迴歸分析結果計算以及實測污染物有高度正相關, CO 之 R2介於 0.8 與 0.84,NOx之 R 2介於 0.74 與 0.86,PM 10之 R 2 介於 0.82 與 0.85。 張庭嘉(民 95)之研究主要目標為建立一套計算污染總量的計算 模式,藉以推估 2004 年國內機車與柴油車的污染排放總量。文中探 討機車燃油消耗狀況並進而推估機車油耗與 CO2排放的關係。最後藉 由 2004 年機車燃油消耗量,再進一步推估國內機車 CO2排放總量。 研 究 中 之 架 構 係 參 考 美 國 之 MOBILE 污 染 排 放 模 式 與 歐 盟 之 COPERT 模式來分別建立使用中柴油車與機車之污染總量推估模式。 文中模式同時也針對 CO、HC、NOx與 PM 等污染物之排放係數進行 修正與建立,也針對 CO、HC、NOx的排放係數做了行車型態、冷熱 啟動及各級道路平均車速的修正。 本節回顧國內外之污染排放係數之推估或運用情形,綜觀國內外 的相關研究中除了部分文獻針對實車進行排放係數推估,大部分依舊 採用 MOBILE 或 COPERT 之模式方法進行推估。我國目前在車輛排 放係數上仍以 MOBILE-Taiwan 作為主要的分析工具,其中公部門目 前較常被使用之線源排放係數參考為環保署之臺灣地區排放量資料 庫(Taiwan Emission Data System,簡稱 TEDS),故本研究也將以此線 源排放資料庫作為排放係數之參考。
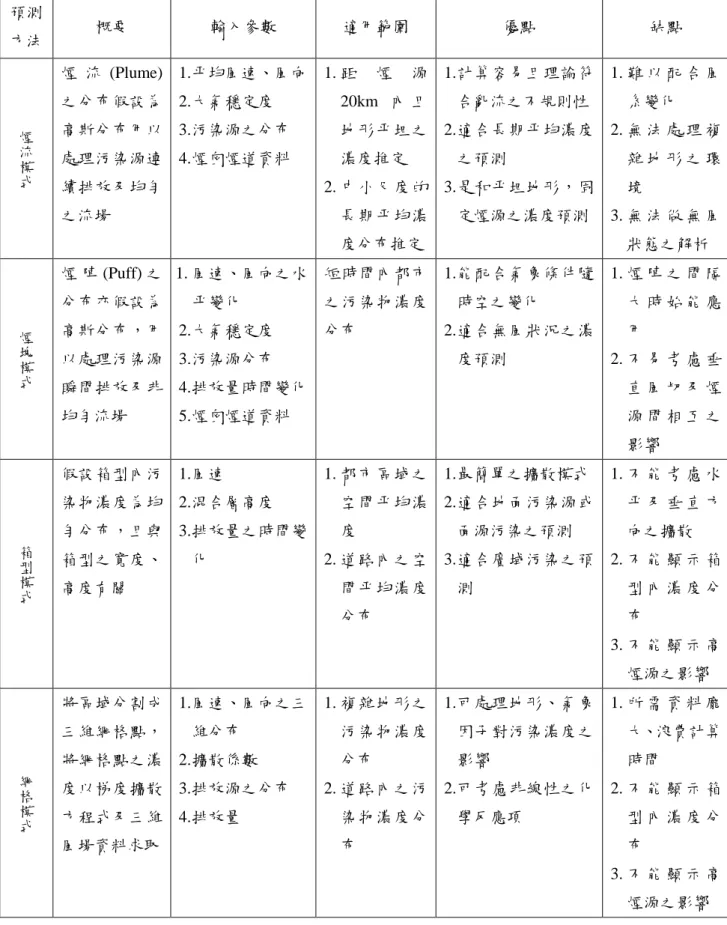
2.1.3 污染擴散模式 藉由排放係數的計算可以得知污染物在空氣中的排放總量,但是 由於不同的氣象條件以及地形因子等條件,會使得污染物在空氣中有 著不同的傳輸情況,而僅計算污染總量並無法得知污染物在空氣中之 擴散情形,因此擴散模型主要是利用數理方程式描述大氣、擴散、煙 流理化過程,以計算不同地點之濃度。因此為了瞭解各種污染物在空 氣中的擴散情況,近年來發展了許多污染擴散模型。而各種模型均有 其特性、限制以及適用範圍,主要可分為四大類型,分別為:箱型模 式(Box Model)、高斯模式(Gaussian model)、Lagrangian model 以及計 算流體力學模式(Computational fluid dynamic models;CFD)。其中箱 型模式以質量守恆為基礎,假設箱內污染物濃度混合且均勻分布,且 只需簡單之氣象、排放資料並設定部分參數即可計算結果,但因所需 之資料簡易因此模擬結果較不足以顯示實際濃度之資訊。 Lagrangian 模式與計算流體力學模式皆屬於網格模式的一種,其 模擬推估方式與箱型模式略為相似,均會設定一槽狀網格以及邊界、 初始濃度之設定,並以平均風速、風量之紊流組成以及分子擴散來計 算其濃度變化,可模擬均勻地形之穩定條件或非均勻定型之非穩定條 件。由於此種方法屬於數值解析分法,雖然可以考慮到沿道路兩側之 地形及建物,但數值解析法將會有大量之計算,且有些邊界條件之設 定較為困難使用上較為不便。所有模式中較為常見的是高斯模式以及 流體力學模式等之擴散模式,其中又以高斯模式之運用最為廣泛。而 各種模式之特性如下表 2-1 所示。 在高斯模式中主要共可兩種預測方法,煙流(Plume)以及煙陣 (Puff),兩者皆是以高斯分布作為煙流或者煙塊之分布假設。而各模 式之比較特性如下表因此本研究將回顧高斯模式之應用以及其評估 績效,以進行擴散評估模式之確立及運用。
表 2-1 物理擴散模式特性 預測 方法 概要 輸入參數 適用範圍 優點 缺點 煙流模式 煙 流 (Plume) 之分布假設為 高斯分布用以 處理污染源連 續排放及均勻 之流場 1. 平均風速、風向 2. 大氣穩定度 3. 污染源之分布 4. 煙囪煙道資料 1. 距 煙 源 20km 內 且 地形平坦之 濃度推定 2. 中小尺度的 長期平均濃 度分布推定 1. 計算容易且理論符 合亂流之不規則性 2. 適合長期平均濃度 之預測 3. 是和平坦地形,固 定煙源之濃度預測 1. 難 以 配 合 風 系變化 2. 無 法 處 理 複 雜 地 形 之 環 境 3. 無 法 做 無 風 狀態之解析 煙塊模式 煙 陣 (Puff) 之 分布亦假設為 高斯分布,用 以處理污染源 瞬間排放及非 均勻流場 1. 風速、風向之水 平變化 2. 大氣穩定度 3. 污染源分布 4. 排放量時間變化 5. 煙囪煙道資料 短時間內都市 之污染物濃度 分布 1. 能配合氣象條件隨 時空之變化 2. 適合無風狀況之濃 度預測 1. 煙 陣 之 間 隔 大 時 始 能 應 用 2. 不 易 考 慮 垂 直 風 切 及 煙 源 間 相 互 之 影響 箱型模式 假設箱型內污 染物濃度為均 勻分布,且與 箱型之寬度、 高度有關 1. 風速 2. 混合層高度 3. 排放量之時間變 化 1. 都市區域之 空間平均濃 度 2. 道路內之空 間平均濃度 分布 1. 最簡單之擴散模式 2. 適合地面污染源或 面源污染之預測 3. 適合廣域污染之預 測 1. 不 能 考 慮 水 平 及 垂 直 方 向之擴散 2. 不 能 顯 示 箱 型 內 濃 度 分 布 3. 不 能 顯 示 高 煙源之影響 網格模式 將區域分割成 三維網格點, 將網格點之濃 度以梯度擴散 方程式及三維 風場資料求取 1. 風速、風向之三 維分布 2. 擴散係數 3. 排放源之分布 4. 排放量 1. 複雜地形之 污染物濃度 分布 2. 道路內之污 染物濃度分 布 1. 可處理地形、氣象 因子對污染濃度之 影響 2. 可考慮非線性之化 學反應項 1. 所 需 資 料 龐 大、浪費計算 時間 2. 不 能 顯 示 箱 型 內 濃 度 分 布 3. 不 能 顯 示 高 煙源之影響 資料來源:鄭宗岳、林鴻祥(民 94)
2.1.3.1 高斯煙流模式
高斯煙流模式是目前運用最廣泛的大氣擴散模式型態,其原理是 煙流垂直與水平擴散方向在穩定狀態下呈高斯分配,Pasquill(1961) 與 Gifford(1976)指出煙流寬與高之氣象穩定度設定由σy與σz來決定。 目前發展許多以高斯方程為架構之擴散模式,如 CALINE(California Department of Transportation)、HIWAY(US EPA)、CAR-FMI(Finish Meteorological Institute)、GFLSM、IITLS 等。其中,GFLSM 以及 IITLS 模型是較為方便運用之數值模型。
Goyal and Rama Krishna (1999)針對印度德里地區之 NO2濃度進 行分析,文中以 CALINE3 以及印度理工學院(IIT)所發展之線源模式 「IITLSM」與實際觀測的空氣品質相互比較,藉以檢驗兩種模式模 擬之績效。結果發現,在平行風的情況下 CALINE3 之濃度模擬結果 會有高估的情況,在斜風以及側風的情況下模擬結果會有低估的情況。 兩種模式皆能夠有效的預測道路之 NO2濃度,其中又以 IITLSM 模式 與觀測值具有較為顯著的相關性。 Wang et al. (2006)探討香港地區之都市路側區域因交通而引起的 氣體以及粒子排放擴散特性。研究中選定三段市區道路進行實地量測, 同時並以 GFLSM 推估其路側污染物 CO 與 PM2.5 之濃度。另外,作 者將 GFLSM 中之擴散參數以 Monin–Obukhov length 法取代離散之 Pasquill 穩定度判斷法。結果發現,根據所量測以及計算之 CO 與 PM2.5 濃度資料有著相當高的一致性,CO 之一致率約為 0.68-0.92, PM2.5 之一致率約為 0.6-0.75。預測值與實測值之迴歸分析結果 CO 之相關係數介於 0.93-0.99 之間,而 PM2.5 之相關係數介於 0.85-0.96 之間,表示該模型能夠準確的預測汙染濃度的分布情形。因此 GFLSM 提供一個較為可靠以及方便的方法來評估香港城市內之空氣品質。 Lin and Ge (2006)利用格位傳遞模式(CTM)模擬車流的運行行為, 並且利用高斯擴散模型 CALINE4 來估計一道路之交通排放以及路邊 空氣品質。根據 CTM 之特性,以格位為單位進行污染排放之計算以 模擬污染物之擴散情形,作者並假設號誌、相關之車流變數以及設定 相關大氣環境變數以模擬實際之道路交通情況,模擬時間設定為 15
個小時包括了早上尖峰以及下午尖峰,並將道路分割成十個格位,以 距離路緣 3 公尺做為擴散預測的地點,分散於道路的四個位置。污染 排放係數以 MOBILE6 進行推估。結果發現,車流模式可以充份模擬 車輛在尖峰以及離峰之行為,在污染物方面發現越接近路口 CO 之濃 度變化比上游路段有更大的變化,污染程度也以靠近路口處較為嚴重。 另外,作者亦利用平均小時之流量以 CALINE4 直接進行模擬,並與 使用格位法之模擬結果發現,由於交通的異質性,利用平均小時車流 量與車速之濃度計算結果會較利用 CTM 模擬來的低。
Ganguly and Broderick (2008)以兩種大氣擴散模式:一般有限線 源模式(GFLSM)以及 CALINE4,用以評估公路路側 CO 之量測。由 於過去的研究已經說明 CALINE4 適合用於愛爾蘭之公路環境,因此 文中以相同的環境條件下利用 GFLSM 來分析與比較兩種模式之模擬 結果,擴散模式中所需使用之排放係數是利用 COPERT3 之架構方法 來計算單位小時之排放係數。而比較之結果發現模擬結果 GFLSM 模 式較 CLAINE4 模式為佳,作者亦針對 GFSLM 模型進行大氣穩定度 以及風速之敏感度分析。在 GFSLM 穩定度敏感度分析中將穩定度分 為「不穩定」、「穩定」以及「中立」,並發現以中立之情況模擬表現 較佳。在風速敏感度分析中將風速分為「小於 0.5 m/s」、「0.5~2 m/s」 以及「大於 2 m/s」,分析結果中顯示以「0.5~2 m/s」之狀態模擬結果 較佳,反之,以「小於 0.5 m/s」之狀態較差。
Ganguly and Broderick (2010) 先 以 印 度 理 工 學 院 所 發 展 之 IITLSM 模式以及 GFSLM 模式在相同地區之實際 NOx 污染濃度相互 比較。在預測單日污染濃度變化時在中午以前之預測較為準確,但越 晚會有高估的情形,並且以 GFLSM 模式表現較好。而前六個月之統 計結果分析顯示,GFLSM 模式對於長期而言也較能接近實際偵測之 濃度,因此在考量可能發生任何風向的情況下是以 GFLSM 的模擬結 果較佳。由於 GFLSM 以證實能夠有效的處理側風及斜風的情況,作 者為了使其能夠更準確的計算在平行風情況下之濃度,因此假設一種 混合模式,將 GFLSM 模式混合 IITLS 模式的概念加以改良。而混合 模式與 GFLSM 模式之比較結果發現,混合模式在處理平行風之條件 下比單獨使用 GFLSM 模式來的有效。
2.1.3.2 高斯煙陣模式 煙陣模式係在煙源不斷連續排放,而將排放體以短時間切割,短 時間之排放體為一煙陣之擴散,煙陣之分布情形亦假設為高斯分布。 Arya(1995)建構一靠近源點且適用於低風速之高斯煙塊模式,並 且針對大氣環境進行相關參數之修正及提議,而此模式適用於大氣穩 定度為中性以及穩定的狀態之下。
Thomson and Manning(2001)針對於低風速狀態下穩態之高斯煙 塊模式,提出一新的求解方法。作者將煙塊模式擴散行為分為小型時 間以及大型時間尺度,並以拉式積分時間尺度(Lagrangian integral time scale)做為擴散時間長短分隔之準則。此種方式之用意在於整合 在不同時間下之煙塊,並且假設在短時間下煙塊成長會與時間成正比, 在長時間下會與時間的均方根成正比。文章中並以此模式與高斯煙流 模式相互比較,並發現此模式有著良好的擴散推估能力,此模式也有 效的說明在低風速下煙塊的變化情形。 Luhar(2011)指出由於部分風向分布複雜所造成的擴散行為可能 呈現非高斯的特性,因此在長時間下可能無法準確的進行推估。而文 章中發現雖然在一般常態穩定的風力狀態下,一般之煙塊模式擁有良 好的解釋與模擬能力,並且也能符合在弱速風情況下之擴散特性。 本節回顧了以高斯分布為基礎之污染擴散模式,其中分為煙流以 及煙陣模式,並發現高斯煙流模式是較常被使用之擴散模式,其原因 在於能夠計算方便計算長時間下之濃度分布情形且此類型之模式也 有較為簡便之軟體可做應用。然而,本計畫之目的在於號誌控制下之 污染影響,由於需要瞭解在短時間下的濃度分布情形,因此煙陣模式 是一較適合之模式,透過該模式可計算出在短時間下之濃度以比較在 不同號誌控制策略方法下對於路外區域不同時間之濃度分布情形。
2.1.4 車輛污染排放模式的常用研究方法 2.1.4.1 污染排放模式 擴散模式需要瞭解污染物之排放強度,並計算交通運具之排放總 量,除了車流量外,排放係數亦是整體模式準確性的重要參數。藉由 文獻回顧瞭解各種排放係數之應用以及校估,本計畫將以環保署所建 構之 TEDS 7.0 線源排放資料庫做為道路污染物排放量之推估參考依 據。 由於國內並無本土化之車輛排放係數推估方式,主要還是參考並 引用美國之推估方式,對於各種污染物質之排放係數推估而言主要分 為兩部分:一為 CO、NOx 及 HC 之推估,主要係採用由中鼎顧問公 司所建構之 MOBILE-Taiwan2.0 模式或直接使用美國 Mobile 相關模 式,而 TEDS7.0 版與 TEDS5.1 版之推估方式皆是以 Mobile-Taiwan2.0 模式來進行;另一部分為 TSP、Pb 及 SOx之推估,此類污染物則是 引用美國「AP-42, VolumeⅡ:Mobile Sourses -Appendix L」之方法來 進行計算。
在 MOBILE 模式中於 HC、CO 與 NOx 排放係數推估之方法中根 據車輛排放特性可將其分為尾氣排放、蒸發排放與行駛損失三大類: 1. 尾氣排放 係指由排氣管排出之廢氣,其排放之污染物有 HC、CO、NOx、 Sox、TSP,也是最主要的排放源。而此類別之排放係數之公式如下 (1) 基本排放率 BER BER=ZML+(DET×CUMMIL/10,000) (2-7) 其中,ZML 為零里程排放率(克/英哩) DET 為每 10000 英哩之劣化率 CUMMIL 為累積車行里程(英哩)
模式假設:車齡愈大時其劣化率愈大,當 CUMMIL >50,000 時 BER=ZML+(DET×5+[DET2×(CUMMIL-50,000)/10,000] (2-8) (1) 模擬年份之基本排放係數 BEF (以 CO 為例,校正至 FTP 之標準 測試狀態) BEF=(BER×OMTCF×PCLEFT)+OFFCO+OMTTAM (2-9) 其中,OMTCF:溫度、RVP 之校正 PCLEFT:I/M 執行效益 OFFCO:低溫 CO 之校正 OMTTAM:污染控制設備因素之校正 (2) 組合排放係數(COEF) COEF=Σ(BEF×TF×SALHCF×RVPCF) (2-10) 其中,TF 為該年份車輛車行里程占總車行里程比例 SACHCF:速度、A/C、EXTRA LOAD、TOWING 校正係數
RVPCF:OPEN LOOP & NO CATALYST VEHICLES 之 RVP 校正
2. 蒸發排放
其中主要參考美國 EPA 對使用中車輛測試之結果,測試之車輛 分為 Tampered and Non-tampered。
3. 行駛損失(Running Loss)-車輛行駛時之蒸發排放
模式依據 7.0、9.0、10.4 及 11.7psi RVP 及在 80、95、105℉溫度 下之測試結果,僅 LDGV 及 LDGT 具有行駛損失資料且溫度必須大
於等於 40℉。若溫度小於 40℉時則為 0;當溫度大於 105℉時,則等 於 105℉之結果。RVF 小於 7 psi 或大於 11.7 psi 時,分別等於 7 psi 及 11.7 psi 之結果。 Mobile-Taiwan 模式推估之原理及公式仍採用 Mobile 模式之推估 架構,但為更符合國內之交通運具特性及環境,需將原本模式中之部 分參數進行修正。主要修正內容為車種分類、單位轉換、調整各類車 種之蒸發排放之數值…等。 而 TEDS7.0 在進行上述應用時所輸入之相關資料參數如油品成 分、耗油率、車齡分布、行車型態、冷氣使用影響污染值之調整、環 境背景參數…等。 以行車型態之調整方案為例,根據「台灣地區空氣污染排放量推 估手冊 TEDS 7.0」之說明,國內目前法規規定之行車型態排氣標準 係分別參考美國(FTP)及歐洲(ECE)標準之行車型態,並非採用國內實 際之行車型態,因此,多數相關檢測均是依法規規定方式測試之結果, 而 TEDS 應用這些檢測結果所換算岀的零里程排放率及劣化率即無 法完全反應實際排放狀況,故需進一步修正。另外,國內對於影響污 染值之相關因素,於近年曾進行過相關研究檢討,包括行車型態及冷 氣使用等對排放量之影響。過去於 TEDS6.1 推估時即開始應用這些 研究結果建立之轉換公式做為排放係數調整之參考,TEDS7.0 之更新 排放係數推估結果亦比照相同方式進行調整。在此調整項目中,主要 調整之車輛包括小客車、小貨車及機車。 小客車之行車型態修正與調整方面,環保署曾於 85 年及 86 年進 行過台北行車型態(TMDC)、高雄行車型態(KMDC)調查,並於 92 年分別在台北市、新竹市、台中市、台南市與高雄市之跟車調查, 得到五種不同的行車形態,再將其組合成兩種行車形態 TWN1 及 TWN2,其中 TWN1 行車形態包括新竹冷啟動 810 秒,台南熱啟動 738 秒,新竹熱啟動 810 秒;TWN2 則包括高雄熱啟動 757 秒,台 北熱啟動 956 秒,台中熱啟動 1032 秒。工研院曾將上述之研究檢測 數據,利用線性迴歸進行分析,結果顯示除台北、高雄行車型態的
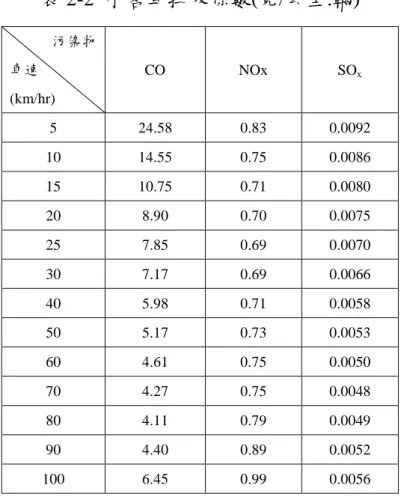
CO 相關性未如其他污染物佳,TWN1 各污染物與 FTP-75 相關性極 佳,依其報告顯示 TWN1 行車形態主要是由新竹市與台南市的行車 形態所組成,可代表一般中型都市的行車形態。而工研院所整理國內 相關行車型態與目前法規所採用美國 FTP 行車型態下污染值測試結 果之相關迴歸式,並利用所得之迴歸式初步作為污染值之修正依據。 在機車的行車型態修正部分,過去曾進行台北、高雄及屏東地區 行車型態調查研究,並透過國內機車行車型態調查測試結果與目前法 規所採用歐洲 ECE40 行車型態下污染值測試結果之相關迴歸式作為 機車污染值之修正方式。 TEDS7.0 中之數值推估是以 96 年或相近年份之資料進行更新與 整理。而計算排放係數的區域由過去 TEDS5.1 與 TEDS6.1 之三區改 為五區,分別為台北縣市、高雄縣市、台中縣市、離島縣市及其他縣 市等,因此在 TEDS7.0 中更新了包括上述五區各年份之平均排放係 數。本研究將以「台北縣市」區域之資料做為排放模式推估之參考, 並在車種之考量上為符合汽機車混合車流之條件因此選擇以「自用小 客車」與「四行程機車」兩種車種做為排放係數之參考,而其污染排 放係數如下表 2-2 所示。
表 2-2 小客車排放係數(克/公里.輛) 污染物 車速 (km/hr) CO NOx SOx 5 24.58 0.83 0.0092 10 14.55 0.75 0.0086 15 10.75 0.71 0.0080 20 8.90 0.70 0.0075 25 7.85 0.69 0.0070 30 7.17 0.69 0.0066 40 5.98 0.71 0.0058 50 5.17 0.73 0.0053 60 4.61 0.75 0.0050 70 4.27 0.75 0.0048 80 4.11 0.79 0.0049 90 4.40 0.89 0.0052 100 6.45 0.99 0.0056 資料來源:行政院環保署排放清冊資料庫 為配合本研究之車流模式特性須將該排放係數進行轉換,將「克 /公里」轉換為「克/秒」,並進行排放函數之配適。其中,小客車與四 行程機車之 CO 排放函數型態如下式(2-11)與(2-12)所示。另外,汽車 怠速之 CO 排放係數為 0.04g/s(交通部運研所,2010),機車怠速之 CO 排放係數為 0.029g/s(張安伶,民 94)。 2 3 -8 4 0.036-0.00035V+0.000078V -0.0000016142V +1.005 10 V× (2-11) 2 3 -9 4 0.025-0.00075V+0.000063V -0.000001182V +7.0755 10 V× (2-12)
圖2.2 小客車之車速(km/hr)與排放係數(g/s)之關係 圖2.3 四行程機車之車速(km/hr)與排放係數(g/s)之關係 由於 TEDS7.0 之排放資料庫中,並未針對車輛怠速進行排放係 數之推估,因此本文中之小客車怠速之排放係數引用自交通部運輸研 究所(2010),針對小客車於一般市區道路上之實車測試值為 0.04g/s, 而機車的部分則引用自張安伶(民 94)的排放係數 0.029g/s。 2.1.4.2 污染擴散模式的研究方法 污染擴散之確定性數學模式(DMM)是根據各種不同的方程式利 用排放清單以及大氣變數等條件,來計算污染物擴散相關之物理過程。 根據質量守恆的原則,微分方程被用於描述污染濃度因平均風速以及 紊流擴散所造成的變化,而一般的高斯線源模式(Gaussian Line Source Model)是利用疊加的原理,受體的濃度是從無限個點源組成線源並將 0 20 40 60 80 100Speed
km
hr
0.00 0.05 0.10 0.15 0.20 Emission Factor
g
s
0 20 40 60 80 100Speed
km
hr
0.00 0.05 0.10 0.15 0.20 Emission Factor
g
s
其進行加總,這種從點源的擴散原理是假設各個點源是獨立存在的。 另外,模式也假設點源是以陣噴的方式散播至大氣之中,其濃度是往 垂直以及水平方向分布。 根據上述對於確定性線源模式的假設,風向座標系(X1, Y1, Z1)以 及線源座標系(X, Y, Z)便是線源模式發展的重要基礎,線源以及風向 座標系之關係如圖 5-3 所示。 X Y Y1 X1 Line Source
Wind Coordinate System
θ QL
Receptor (x, y)
L
Line Source Coordinate System
資料來源:Nagendra and Khare (2002)
圖2.4 線源與風向座標系示意圖 煙陣模式係在煙源不斷連續排放,而將排放體以短時間切割,短 時間之排放體為一煙陣之擴散。經 t 時間後 x, y, z 軸方向之擴散標準 差各為σx,σy,σz 之形狀擴散,隨著時間的經過,煙塊逐漸擴大。因 此在煙陣模式中受體(x,y,z)經 t 時間後之濃度計算方法為: 2 2 2 3/ 2 0 2 2 2 1 ( ) ( , , , ) exp{ } (2 ) 2 2 2 t x y z x y z Q x ut y z c x y z t dt p σ σ σ σ σ σ ′ ′ − ′ =
∫
− − − (2-13) 其中,Q 為排放源強度(unit/s);σx、σ 與y σz分別為 x,y,z 方向之濃度 分布標準差,為一與時間 t 有關之函數。t′為煙塊之形成時間;z′ = −z zs, 其中 zs為排放源點之高度,z 為受體與地面之高度(m),u為排放源高 度之平均風速。Thomson and Manning(2001)指出穩態高斯煙陣的擴散型態分為 small-time 與 large-time,而其關係如式(2-14)所示 if 2 2 if 2 y x z u v w t t t t t σ σ σ σ σ σ t t ′ ′ ≤ = = = ′ ′ > (2-14)
其中,τ 為拉氏積分時間尺度(Lagrangian time scale),而σu、σv與σw分 別為 x,y,z 方向之紊流均方跟速度。Luhar(2010)藉由風速與風向等統 計資料推估σu與σv分別為式(2-15)與式(2-16)所示,Caughey et al. (1979)建議近地層(surface layer)的紊流均方根速度為式(2-17)所示: 2 2 2 2 2 [cosh( ){1 ( U) exp( )} 1] u u u θ θ σ σ = σ + −σ − (2-15) 2 2 2 2 2 sinh( ){1 ( U ) exp( )} v u u θ θ σ σ = σ + −σ (2-16) 2 2 * (1.25 ) w u σ = (2-17)
另外,拉氏積分時間尺度( Lagrangian time scale )τ 可由下式求 得: * 2 L h w zu T κ φ σ = (2-18) 式中φh為熱量的大氣穩定校正函數(stability correction function for heat),Ley et al. (1983)建議在中性及穩定的大氣狀態下,
1 5 h z L φ = + (2-19) 而不穩定大氣狀態下則為, 1 3 0.32 0.0037 h z L φ − = − (2-20) 其中,κ :馮卡門常數(0.41) L:奧布考夫長度(Obukhov’s length) σw:垂直均方根速度 u*:地表摩擦速率 z:高度
2.2 車流模式與模擬
2.2.1 車流模式 交通車流理論旨在探討、分析以及模擬車流運行的行為。車流理 論根據對車輛行為特性之觀察以及模擬的細緻程度,可分為巨觀 (Macroscopic)、中觀(Mesoscopic)及微觀(Microscopic)等三種類別。 巨觀模式著重在於描述車流的三大特性參數:流量(q)、密度(k) 以及速率(u)之間的關係,係以某段時間內整體路網車流狀況為觀測 重點,而不強調單一車輛或某一車隊的運行行為;其優點為資料統計 方便,可透過交通調查技術搜集到車流資料,但較難反映交通組成及 車輛運行間的關係。反之,微觀車流模式則著重強調時間-空間下, 個別駕駛者因應前方車輛狀況之反應行為,係以探討車輛之間彼此的 互動關係,例如跟車行為、車道變換或者超車等駕駛特性;但微觀車 流模式需要觀察每一部車的行為,其觀測的變數包括個別車輛之加減 速率及速率、前後兩車的時間車間距,以及前後車在於速度上的差異 等資料,因此在蒐集資料上會耗費較多成本,且由於每輛車運行行為 均以函數方式加以推導及預測,因此在模式操作上也會較為繁雜與耗 時。 巨觀車流模式係利用車流的速率、密度以及流量三者的關係函數, 並依據流量守恆法則,可用來描述車輛時空運行行為,且有效分析在 交通環境變化對於車流所產生的影響。此類型之車流模式甚多,其中 以簡單連續流模式(simple continuum model, SCM)、高階連續流模式 (high order model, HOM),以及格位傳遞模式(cell transmission model, CTM)較為著名,以下文獻回顧將依序做介紹。 簡單連續流模式最早由 Lighthill 及 Whitham (1955)提出,將車流 視為一度空間的可壓縮流體,並以流量守恆方程式推導出動力學方程 式,Richard(1956)提出類似的車流理論,因此又被合稱為 LWR 模式。 以車流理論流量(q)及密度(k)之關係為基礎,並令速率與密度具有一 對一之關係,而在模式中反映出流量及密度的變化會彼此影響,當流 量到達最大流量密度(kmax)時車流量將會開始減少,直到飽和密度(kj)時流量為 0,示意如圖 2.5。
q
k
qmax kmax kj 0 圖2.5 簡單連續流模式流量密度關係圖 LWR 模式主要概念來自於流量守恆方程式,以密度(k)對時間微 分以及流量(q)對路段長度(x)微分之關係,表示上游車流最終會通往 下游路段,又稱為一階連續流模式。簡單連續流模式係以車隊形式, 透過流量守恆及密度流量之關係,探討因車隊行為改變所形成之衝擊 波,並藉此描述車流行為。此種方式擁有巨觀蒐集資料之方便性,透 過密度、流量與衝擊波間之關係了解車隊運行的變化,亦兼具微觀之 特性。 由於簡單連續流模式中「速率與密度為一對一關係」之假設與實 際車流有幾點不合理之處;首先,流量-密度關係圖僅存在於車流達 穩定狀態時的情形,但根據跟車理論,車流運行過程中會有有相當大 之比例是處於不穩定狀態。其次是由於駕駛人反應時間之關係,速率 並無法因應密度的改變而作立即的改變,才會有延滯現象之產生。第 三,簡單連續流模式假設車流為連續性,因此當流量不高時應用上會 發生錯誤之情況。 因此,為解決上述情況,Whitham(1974)和 Payne(1979)則以動量 方程式(momentum equation)取代簡單連續流模式所引用的車流模式, 並推導車隊中加減速之關係,以模擬出行駛速率會受到駕駛人反應時 間之影響。藉由動量方程式以及流量守恆方程式之結合,發展高階連 續流模式(HOM)。而高階連續流模式會較簡單連續流模式更接近實際 車流行為,但其求解過程則更為複雜。Daganzo(1994)提出格位傳遞模式(cell transmission model, CTM) 便是以離散的方式來推估車流,此模式主要是透過車流流體理論之概 念引伸而來,用以預測車流在空間、時間上之流動情形。格位傳遞模 式假設在一均質的系統中,將道路分割成多個格位(Cell),每個格位 特性皆為獨立且具有同質性,而其所推估之車流運行結果與 LWR 模 式之流量與密度圖類似,以梯形表示如圖 2.6。結合 Newell(1991)提 出預測單一車道路段之進出口車流行為模式,但此模式未推估路段中 的車流行為,因此,Daganzo 提出格位傳遞模式推估路段中的車流行 為,以時間與空間的關係,構建在單車道、單一出入口及單車種等均 質狀態下推估車輛在路段中的行為。 q k vkj/2 ka kj 0 k b qm v -w 圖2.6 格位傳遞模式流量-密度關係圖 格位傳遞模式利用格位間的轉換,推估車隊由上游到下游之行為, 示意如圖 2.6 所示。圖中可了解車隊在時間變化下之空間變化,其格 位長度係以設定時間間隔內,自由車流速度可行駛之距離,車隊在格 位內轉換係依據格位內之車輛數、最大流量及可容納之空間等因子, 透過這些因子,模式在應用上可得到自由速率、最大流量、飽和密度 及衝擊波波速等參數;這些參數在交通工程上可應用在複雜的路網上, 評估總延滯時間以及旅行時間等績效指標。詳細之模式推估與計算將 於第五章研究方法做詳細介紹。
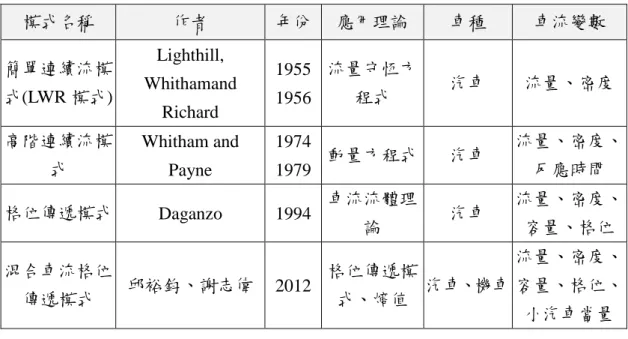
1 2 3 t-1 t t+1 圖2.7 格位傳遞模式格位示意圖 市區道路包含不同類型之交通運具,以我國市區道路而言,汽車 及機車為主要之交通工具,不同類型之運具其運行特性均有差異。由 於這兩種運具除了在相同時間、空間上所能承受之密度以及容量皆有 所不同,對於機車之使用行為也與汽車有著相當大的差異,例如當汽 車密度達飽和時,機車仍然能穿梭在汽車間的縫隙;在評估汽機車混 合車流行為時,以往僅將機車換算成小客車當量,卻忽略了機車運行 特性,容易影響相關交通工程方案結果。因此,在探討國內市區道路 交通狀況時,考量汽車與機車之混合車流模式將有其必要性。 邱裕鈞和謝志偉(2012)以格位傳遞模式為基礎,加入格位傳遞模 式未考慮之混合車流特性,建構混合車流格位傳遞模式(mixed traffic cell transmission models, MCTM)。研究中建構混合車流格位傳遞模式 係考慮多車流行為,探討汽車與機車之混合車流行為,格位車種由單 一車種改變成汽車與機車兩種車種,並且在兩種車種進行格位傳遞時, 將產生競爭的現象分為三種型態:無競爭關係、最大流量競爭以及剩 餘儲車空間競爭。其研究係透過汽、機車兩種車種之競爭關係來建立 混合車流之模式,並藉由蒐集實際道路資料進行模式驗證,以比較實 際值與模擬值與修正推估之參數,以絕對誤差百分比(MAPE)與均方 根誤差法(RMSE)評估模式模擬之績效。綜觀以上所述巨觀車流模式, 可整理如表 2-3。
表 2-3 巨觀車流模式整理 模式名稱 作者 年份 應用理論 車種 車流變數 簡單連續流模 式(LWR 模式) Lighthill, Whithamand Richard 1955 1956 流量守恆方 程式 汽車 流量、密度 高階連續流模 式 Whitham and Payne 1974 1979 動量方程式 汽車 流量、密度、 反應時間 格位傳遞模式 Daganzo 1994 車流流體理 論 汽車 流量、密度、 容量、格位 混合車流格位 傳遞模式 邱裕鈞、謝志偉 2012 格位傳遞模 式、熵值 汽車、機車 流量、密度、 容量、格位、 小汽車當量 資料來源:陳惠國等(2011)、謝志偉(2012)、吳怡潔(2012) 微觀車流模式最早由 Reuschel(1950)與 Pipes(1953)所提出,其基 本假設係利用期望速率、間程、相對速率,以及駕駛者反應時間等參、 變數,來模化單一車輛的駕駛行為分析基礎。而駕駛行為中(包括跟 車、變換車道、超車等)又以跟車行為(car following behaviors)之相關 研究最多。所謂跟車理論顧名思義即是後車(following car)依據其與前 車(lead car)之互動關係,進行加減速率之決策,以達到跟車的目的。 在跟車理論最著名的即是 Herman 所領導的研究群,於 1958 至 1964 年間透過通用汽車實驗室(General Motors Researches Laboratories)進 行跟車行為之觀測與模化,陸續發表 5 個模式,通稱為 GM 模式,其 通式如下:
(
)
(
)
( )
( )
[
x t x t]
[
x( )
t x( )
t]
T t x T t x l n n n n m n n 1 1 1 2 1 + + + + − − + = + l (2-21) 其中,xn 1+ ( )t :第 n+1 輛車在 t 時的空間位置,即距離函數 ( )t xn 1+ :距離函數的一次微分,代表速率 ( )t xn 1+ :距離函數的二次微分,正值代表加速率,負值則代表 減速率。 T:駕駛人之反應時間( )t x ( )t xn − n+1 :前後車的相對速率 λ0:敏感度(sensitivity) m 及 l:參數 當 l = 0 及 m = 0 時為第一代 GM 模式 當 l = 1 及 m = 0 時為第三代 GM 模式 當 l = 1 或 2 及 m =1 時為第四代 GM 模式 此外,微觀車流模式中仍有許多其他著名模式,例如,模糊推論 模 式 (fuzzy inference model) 、 心 理 ─ 物 理 行 為 門 檻 模 式 (psycho-physical behavior threshold model)及細胞自動機模式(cellular automaton, CA)等。分述如下:
1. 模糊推論模式
傳統跟車理論假設每位駕駛人為同質(homogeneous),且假設駕 駛人行為與周遭環境的變化有一明確關係,但通常駕駛人的駕駛行為 並無一定規則可尋,與外界環境並非一對一的確定關係,其間存在若 干的模糊性。基此,Kikuchi and Chakroborty (1993) 將跟車行為視為 一模糊控制系統,並用模糊邏輯(fuzzy logic)、模糊推論(fuzzy inference) 來進行模擬。由於模糊推論正是用以近似人類的推論、決策及控制行 為,頗適合用來模化駕駛行為。惟其缺點在於模糊推論規則及模糊隸 屬函數通常必須主觀設定,致使其應用彈性受限。基此,邱裕鈞、藍 武王(民 90)及 Chiou and Lan(2005)即提出基因邏輯控制模式(genetic fuzzy logic control, GFLC)利用基因演算法(genetic algorithm, GA)自動 學習最佳之邏輯規則與隸屬函數,並應用於跟車行為,確可獲致良好 績效。 2. 心理─物理行為門檻模式(陳世泉,1993;張建彥等人,2005) 心理─物理行為門檻模式係 Hoefs(1972)於車流觀察中發現,當 後車駕駛者感知到前車與自身之間距及相對速率差異過大時,會加速 貼近前車以縮短間距,逐漸由不受影響駕駛範圍進入受影響駕駛範圍; 當後車駕駛者感知到過於貼近前車不安全時,則減速以加大間距;減 速後之間距若不合後車駕駛者之期望則再加速,整個系統就在本車不